 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection with Uncertainty in Target Direction for Dual Functional Radar and Communication Systems
Dec 10, 2024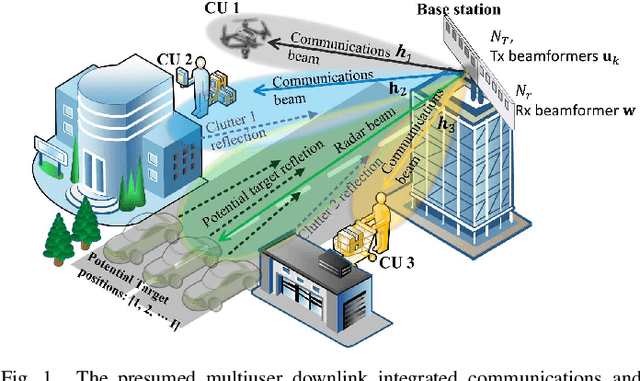
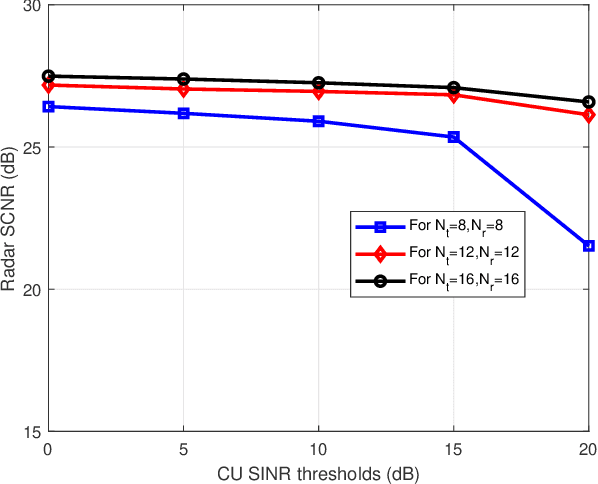
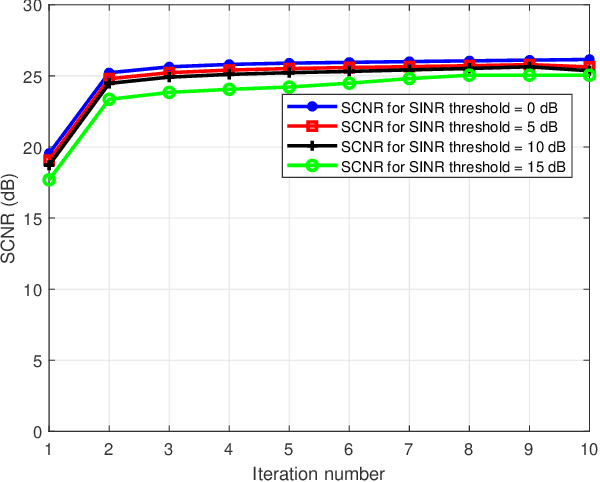
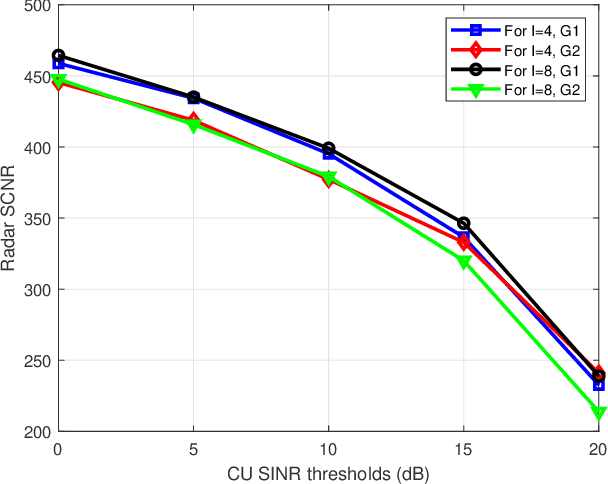
Dual functional radar and communication (DFRC) systems are a viable approach to extend the services of future communication systems. Most studies designing DFRC systems assume that the target direction is known. In our paper, we address a critical scenario where this information is not exactly known. For such a system, a signal-to-clutter-plus-noise ratio (SCNR) maximization problem is formulated. Quality-of-service constraints for communication users (CUs) are also incorporated as constraints on their received signal-to-interference-plus-noise ratios (SINRs). To tackle the nonconvexity, an iterative alternating optimization approach is developed where, at each iteration, the optimization is alternatively performed with respect to transmit and receive beamformers. Specifically, a penalty-based approach is used to obtain an efficient sub-optimal solution for the resulting subproblem with regard to transmit beamformers. Next, a globally optimal solution is obtained for receive beamformers with the help of the Dinkleback approach. The convergence of the proposed algorithm is also proved by proving the nondecreasing nature of the objective function with iterations. The numerical results illustrate the effectiveness of the proposed approach. Specifically, it is observed that the proposed algorithm converges within almost 3 iterations, and the SCNR performance is almost unchanged with the number of possible target directions.
Low Complexity Algorithms for Mission Completion Time Minimization in UAV-Based ISAC Systems
Oct 12, 2023



The inherent support of sixth-generation (6G) systems enabling integrated sensing and communications (ISAC) paradigm greatly enhances the application area of intelligent transportation systems (ITS). One of the mission-critical applications enabled by these systems is disaster management, where ISAC functionality may not only provide localization but also provide users with supplementary information such as escape routes, time to rescue, etc. In this paper, by considering a large area with several locations of interest, we formulate and solve the optimization problem of delivering task parameters of the ISAC system by optimizing the UAV speed and the order of visits to the locations of interest such that the mission time is minimized. The formulated problem is a mixed integer non-linear program which is quite challenging to solve. To reduce the complexity of the solution algorithms, we propose two circular trajectory designs. The first algorithm finds the optimal UAV velocity and radius of the circular trajectories. The second algorithm finds the optimal connecting points for joining the individual circular trajectories. Our numerical results reveal that, with practical simulation parameters, the first algorithm provides a time saving of at least $20\%$, while the second algorithm cuts down the total completion time by at least $7$ times.