 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Noise Source Estimation of a Camera System from an Image and Metadata
Apr 04, 2024Autonomous machines must self-maintain proper functionality to ensure the safety of humans and themselves. This pertains particularly to its cameras as predominant sensors to perceive the environment and support actions. A fundamental camera problem addressed in this study is noise. Solutions often focus on denoising images a posteriori, that is, fighting symptoms rather than root causes. However, tackling root causes requires identifying the noise sources, considering the limitations of mobile platforms. This work investigates a real-time, memory-efficient and reliable noise source estimator that combines data- and physically-based models. To this end, a DNN that examines an image with camera metadata for major camera noise sources is built and trained. In addition, it quantifies unexpected factors that impact image noise or metadata. This study investigates seven different estimators on six datasets that include synthetic noise, real-world noise from two camera systems, and real field campaigns. For these, only the model with most metadata is capable to accurately and robustly quantify all individual noise contributions. This method outperforms total image noise estimators and can be plug-and-play deployed. It also serves as a basis to include more advanced noise sources, or as part of an automatic countermeasure feedback-loop to approach fully reliable machines.
* 16 pages, 16 figures, 12 tables, Project page: https://github.com/MaikWischow/Noise-Source-Estimation
Region-of-Interest Prioritised Sampling for Constrained Autonomous Exploration Systems
Jul 15, 2021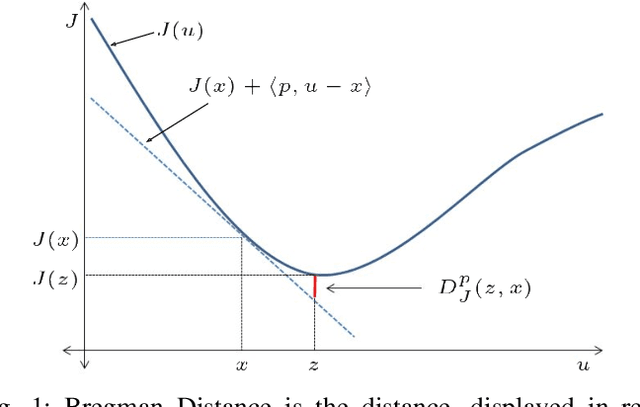
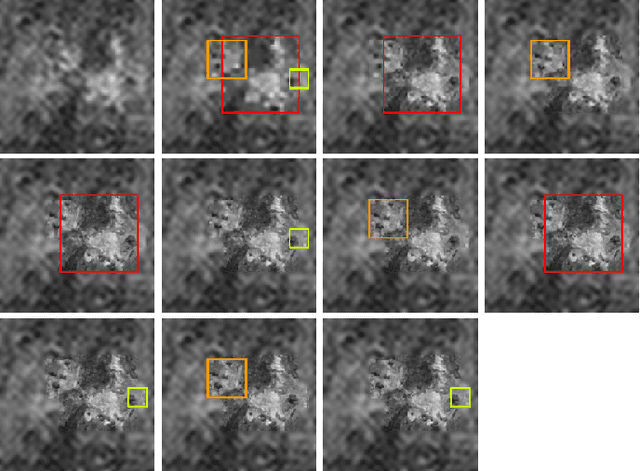
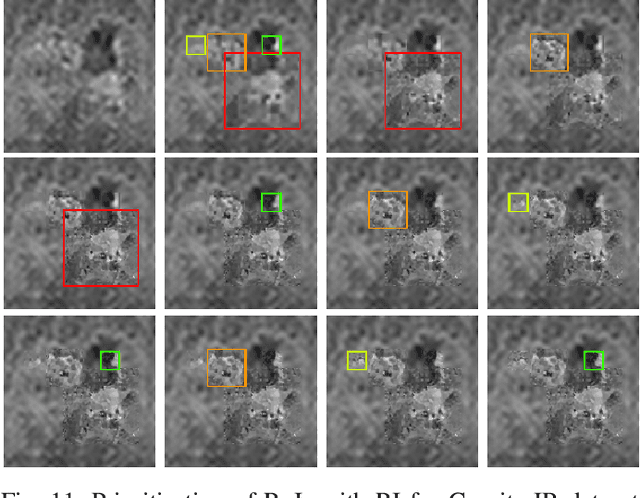
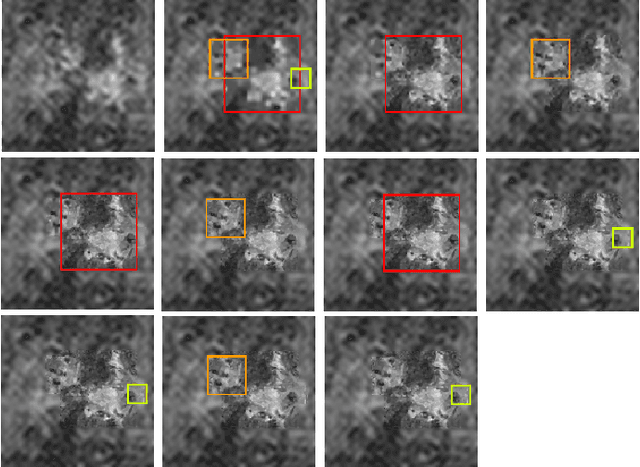
Goal oriented autonomous operation of space rovers has been known to increase scientific output of a mission. In this work we present an algorithm, called the RoI Prioritised Sampling (RPS), that prioritises Region-of-Interests (RoIs) in an exploration scenario in order to utilise the limited resources of the imaging instrument on the rover effectively. This prioritisation is based on an estimator that evaluates the change in information content at consecutive spatial scales of the RoIs without calculating the finer scale reconstruction. The estimator, called the Refinement Indicator, is motivated and derived. Multiscale acquisition approaches, based on classical and multi-level compressed sensing, with respect to the single pixel camera architecture are discussed. The performance of the algorithm is verified on airborne sensor images and compared with the state-of-the-art multi-resolution reconstruction algorithms. At the considered sub-sampling rates the RPS is shown to better utilise the system resources for reconstructing the RoIs.