 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegion-of-Interest Prioritised Sampling for Constrained Autonomous Exploration Systems
Jul 15, 2021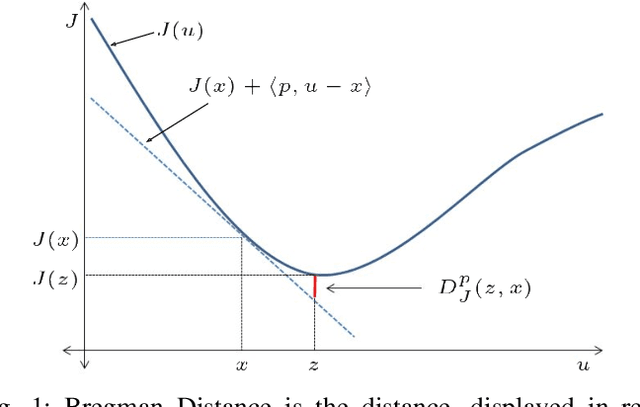
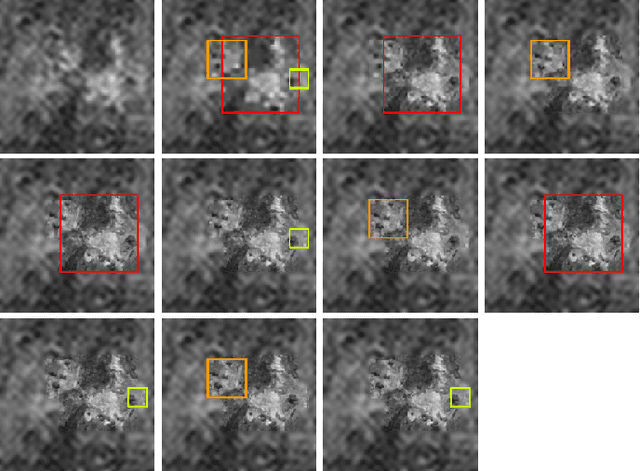
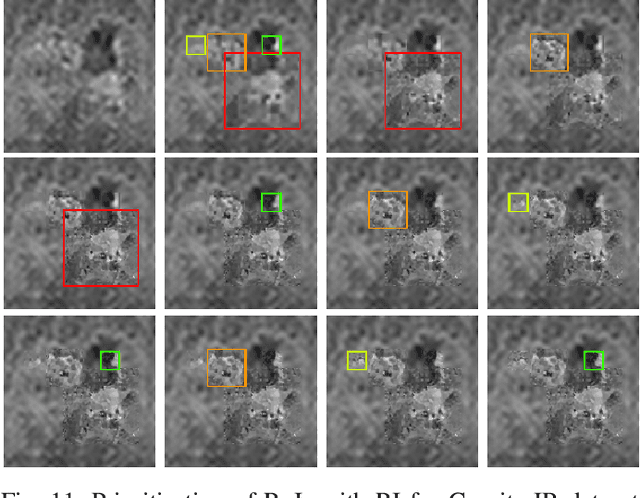
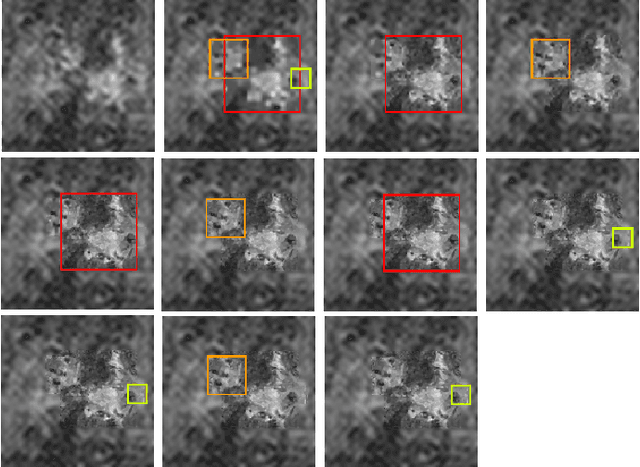
Goal oriented autonomous operation of space rovers has been known to increase scientific output of a mission. In this work we present an algorithm, called the RoI Prioritised Sampling (RPS), that prioritises Region-of-Interests (RoIs) in an exploration scenario in order to utilise the limited resources of the imaging instrument on the rover effectively. This prioritisation is based on an estimator that evaluates the change in information content at consecutive spatial scales of the RoIs without calculating the finer scale reconstruction. The estimator, called the Refinement Indicator, is motivated and derived. Multiscale acquisition approaches, based on classical and multi-level compressed sensing, with respect to the single pixel camera architecture are discussed. The performance of the algorithm is verified on airborne sensor images and compared with the state-of-the-art multi-resolution reconstruction algorithms. At the considered sub-sampling rates the RPS is shown to better utilise the system resources for reconstructing the RoIs.
Scattering Transform Based Image Clustering using Projection onto Orthogonal Complement
Nov 24, 2020
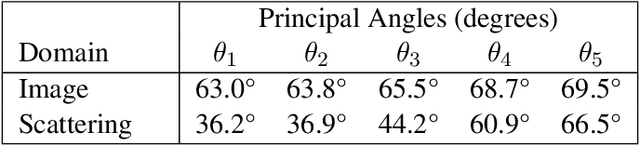
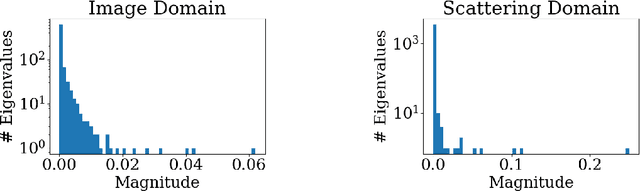

In the last few years, large improvements in image clustering have been driven by the recent advances in deep learning. However, due to the architectural complexity of deep neural networks, there is no mathematical theory that explains the success of deep clustering techniques. In this work we introduce Projected-Scattering Spectral Clustering (PSSC), a state-of-the-art, stable, and fast algorithm for image clustering, which is also mathematically interpretable. PSSC includes a novel method to exploit the geometric structure of the scattering transform of small images. This method is inspired by the observation that, in the scattering transform domain, the subspaces formed by the eigenvectors corresponding to the few largest eigenvalues of the data matrices of individual classes are nearly shared among different classes. Therefore, projecting out those shared subspaces reduces the intra-class variability, substantially increasing the clustering performance. We call this method Projection onto Orthogonal Complement (POC). Our experiments demonstrate that PSSC obtains the best results among all shallow clustering algorithms. Moreover, it achieves comparable clustering performance to that of recent state-of-the-art clustering techniques, while reducing the execution time by more than one order of magnitude. In the spirit of reproducible research, we publish a high quality code repository along with the paper.
Region segmentation via deep learning and convex optimization
Nov 28, 2019



In this paper, we propose a method to segment regions in three-dimensional point clouds. We assume that (i) the shape and the number of regions in the point cloud are not known and (ii) the point cloud may be noisy. The method consists of two steps. In the first step we use a deep neural network to predict the probability that a pair of small patches from the point cloud belongs to the same region. In the second step, we use a convex-optimization based method to improve the predictions of the network by enforcing consistency constraints. We evaluate the accuracy of our method on a custom dataset of convex polyhedra, where the regions correspond to the faces of the polyhedra. The method can be seen as a robust and flexible alternative to the famous region growing segmentation algorithm. All reported results are reproducible and come with easy to use code that could serve as a baseline for future research.