 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStow: Robotic Packing of Items into Fabric Pods
May 07, 2025



This paper presents a compliant manipulation system capable of placing items onto densely packed shelves. The wide diversity of items and strict business requirements for high producing rates and low defect generation have prohibited warehouse robotics from performing this task. Our innovations in hardware, perception, decision-making, motion planning, and control have enabled this system to perform over 500,000 stows in a large e-commerce fulfillment center. The system achieves human levels of packing density and speed while prioritizing work on overhead shelves to enhance the safety of humans working alongside the robots.
Reacting to Contact: Transparency and Collision Reflex in Actuation
Dec 07, 2022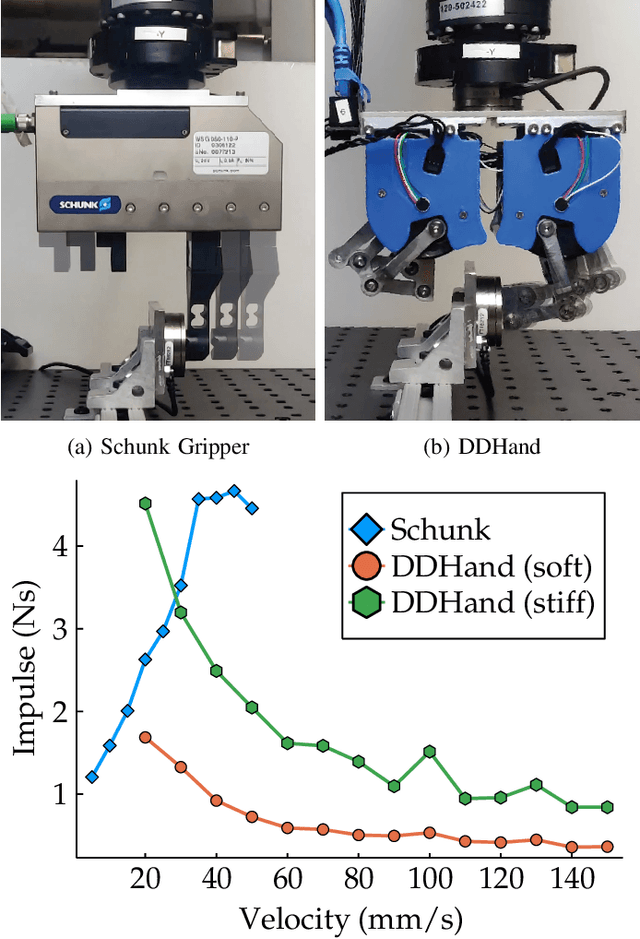
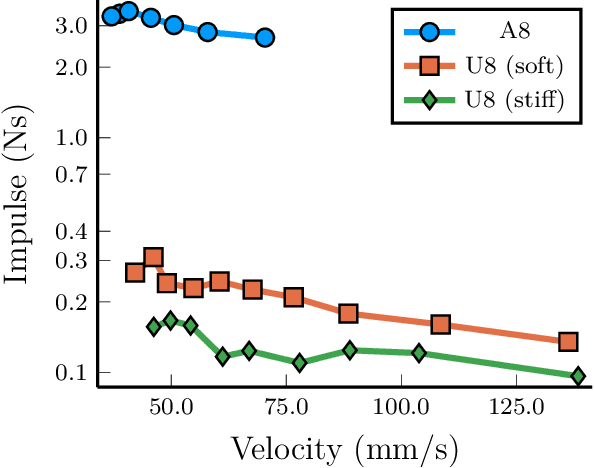
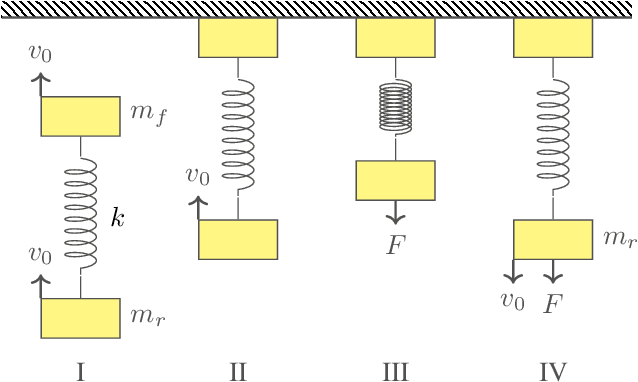
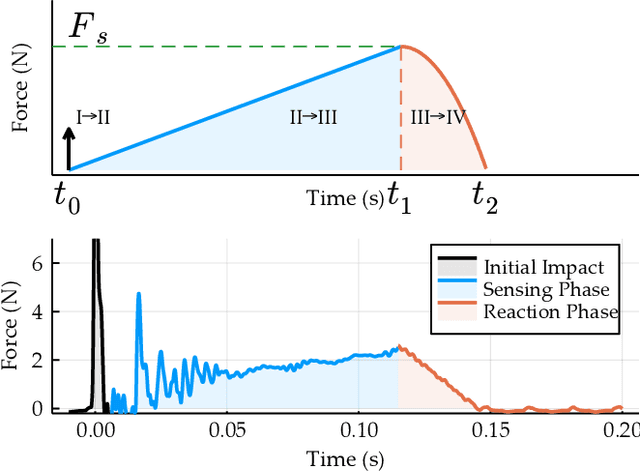
In unstructured environments, robots run the risk of unexpected collisions. How well they react to these events is determined by how transparent they are to collisions. Transparency is affected by structural properties as well as sensing and control architectures. In this paper, we propose the collision reflex metric as a way to formally quantify transparency. It is defined as the total impulse transferred in collision, which determines the collision mitigation capabilities of a closed-loop robotic system taking into account structure, sensing, and control. We analyze the effect of motor scaling, stiffness, and configuration on the collision reflex of a system using an analytical model. Physical experiments using the move-until-touch behavior are conducted to compare the collision reflex of direct-drive and quasi-direct-drive actuators and robotic hands (Schunk WSG-50 and Dexterous DDHand.) For transparent systems, we see a counter-intuitive trend: the impulse may be lower at higher pre-impact velocities.