 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Iterative 2D/3D Registration
Jul 21, 2021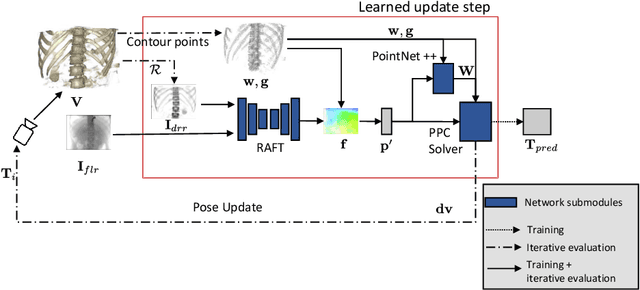
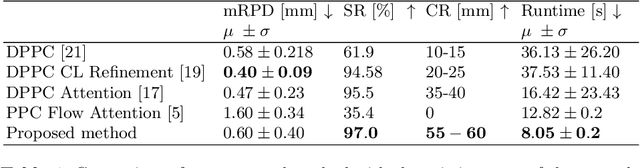
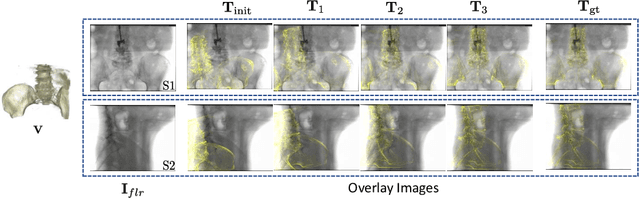
Deep Learning-based 2D/3D registration methods are highly robust but often lack the necessary registration accuracy for clinical application. A refinement step using the classical optimization-based 2D/3D registration method applied in combination with Deep Learning-based techniques can provide the required accuracy. However, it also increases the runtime. In this work, we propose a novel Deep Learning driven 2D/3D registration framework that can be used end-to-end for iterative registration tasks without relying on any further refinement step. We accomplish this by learning the update step of the 2D/3D registration framework using Point-to-Plane Correspondences. The update step is learned using iterative residual refinement-based optical flow estimation, in combination with the Point-to-Plane correspondence solver embedded as a known operator. Our proposed method achieves an average runtime of around 8s, a mean re-projection distance error of 0.60 $\pm$ 0.40 mm with a success ratio of 97 percent and a capture range of 60 mm. The combination of high registration accuracy, high robustness, and fast runtime makes our solution ideal for clinical applications.
Learning the Update Operator for 2D/3D Image Registration
Feb 04, 2021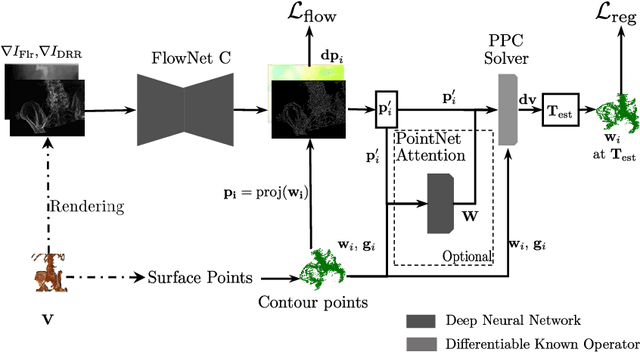
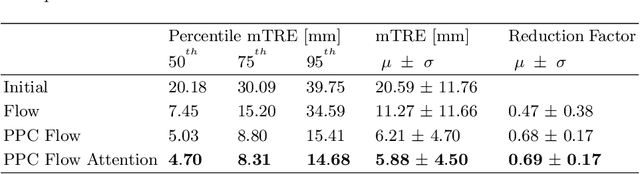
Image guidance in minimally invasive interventions is usually provided using live 2D X-ray imaging. To enhance the information available during the intervention, the preoperative volume can be overlaid over the 2D images using 2D/3D image registration. Recently, deep learning-based 2D/3D registration methods have shown promising results by improving computational efficiency and robustness. However, there is still a gap in terms of registration accuracy compared to traditional optimization-based methods. We aim to address this gap by incorporating traditional methods in deep neural networks using known operator learning. As an initial step in this direction, we propose to learn the update step of an iterative 2D/3D registration framework based on the Point-to-Plane Correspondence model. We embed the Point-to-Plane Correspondence model as a known operator in our deep neural network and learn the update step for the iterative registration. We show an improvement of 1.8 times in terms of registration accuracy for the update step prediction compared to learning without the known operator.
Metric-Driven Learning of Correspondence Weighting for 2-D/3-D Image Registration
Oct 26, 2018
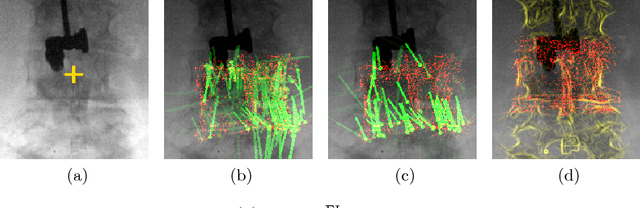
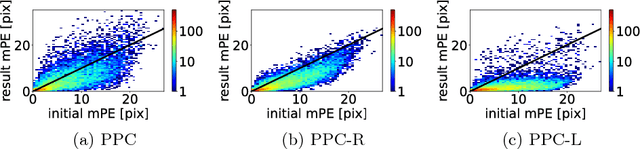
Registration of pre-operative 3-D volumes to intra-operative 2-D X-ray images is important in minimally invasive medical procedures. Rigid registration can be performed by estimating a global rigid motion that optimizes the alignment of local correspondences. However, inaccurate correspondences challenge the registration performance. To minimize their influence, we estimate optimal weights for correspondences using PointNet. We train the network directly with the criterion to minimize the registration error. We propose an objective function which includes point-to-plane correspondence-based motion estimation and projection error computation, thereby enabling the learning of a weighting strategy that optimally fits the underlying formulation of the registration task in an end-to-end fashion. For single-vertebra registration, we achieve an accuracy of 0.74$\pm$0.26 mm and highly improved robustness. The success rate is increased from 79.3 % to 94.3 % and the capture range from 3 mm to 13 mm.