 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Consensus on Feature Distribution for Multi-robot Systems with Markovian Exploration Dynamics
Feb 07, 2022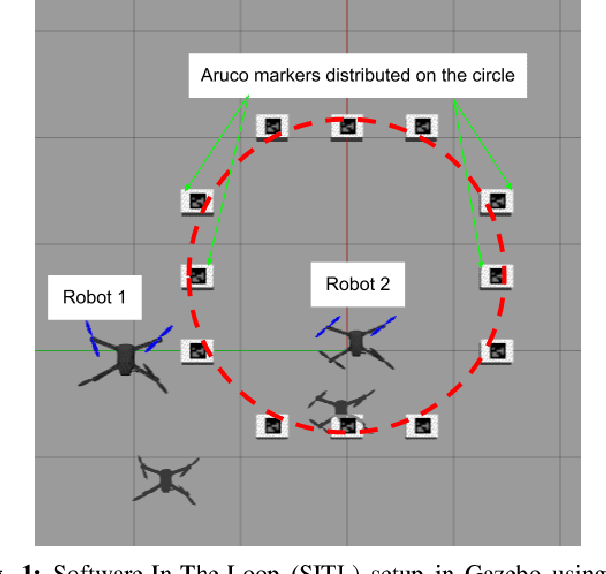
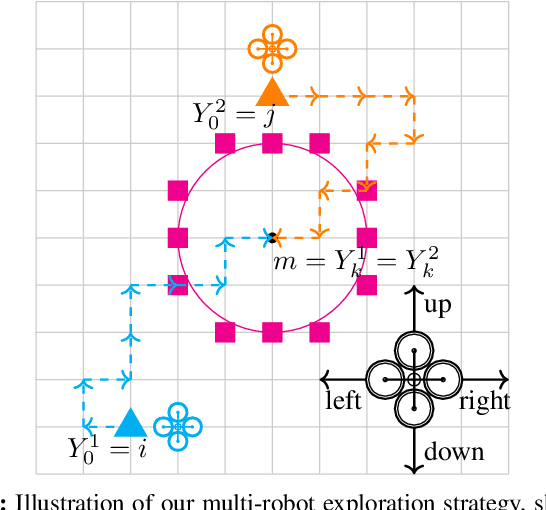
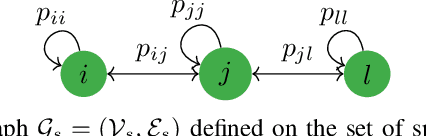
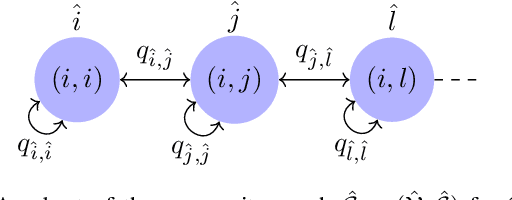
In this paper, we present a consensus-based decentralized multi-robot approach to reconstruct a discrete distribution of features, modeled as an occupancy grid map, that represent information contained in a bounded planar environment, such as visual cues used for navigation or semantic labels associated with object detection. The robots explore the environment according to a random walk modeled by a discrete-time discrete-state (DTDS) Markov chain and estimate the feature distribution from their own measurements and the estimates communicated by neighboring robots, using a distributed Chernoff fusion protocol. We prove that under this decentralized fusion protocol, each robot's feature distribution converges to the actual distribution in an almost sure sense. We verify this result in numerical simulations that show that the Hellinger distance between the estimated and actual feature distributions converges to zero over time for each robot. We also validate our strategy through Software-In-The-Loop (SITL) simulations of quadrotors that search a bounded square grid for a set of visual features distributed on a discretized circle.
Decentralized Multi-target Tracking with Multiple Quadrotors using a PHD Filter
Dec 04, 2020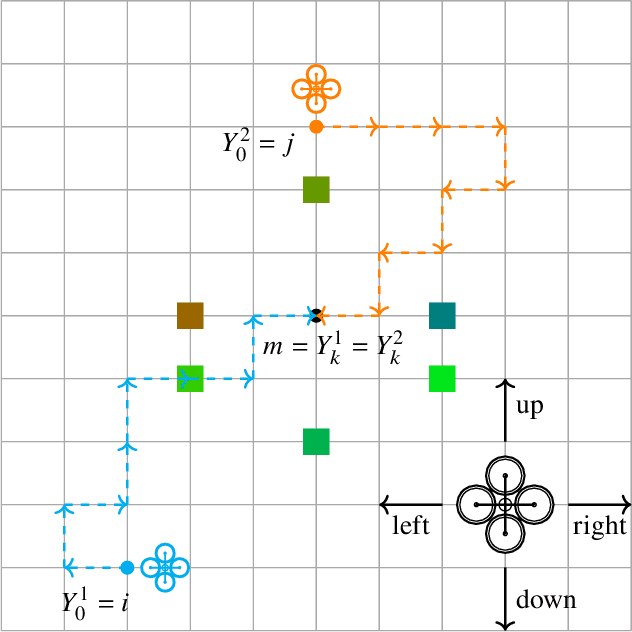
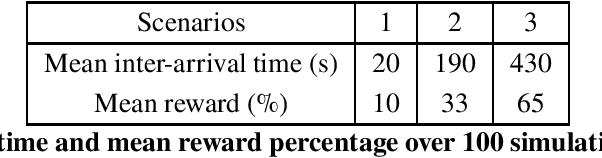
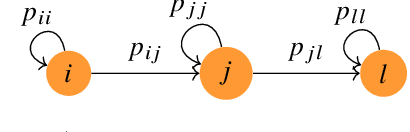
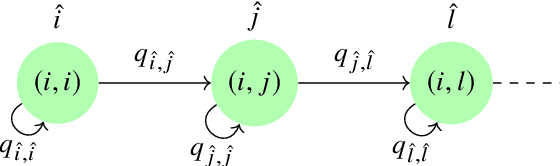
We consider a scenario in which a group of quadrotors is tasked at tracking multiple stationary targets in an unknown, bounded environment. The quadrotors search for targets along a spatial grid overlaid on the environment while performing a random walk on this grid modeled by a discrete-time discrete-state (DTDS) Markov chain. The quadrotors can transmit their estimates of the target locations to other quadrotors that occupy their current location on the grid; thus, their communication network is time-varying and not necessarily connected. We model the search procedure as a renewal-reward process on the underlying DTDS Markov chain. To accommodate changes in the set of targets observed by each quadrotor as it explores the environment, along with uncertainties in the quadrotors' measurements of the targets, we formulate the tracking problem in terms of Random Finite Sets (RFS). The quadrotors use RFS-based Probability Hypothesis Density (PHD) filters to estimate the number of targets and their locations. We present a theoretical estimation framework, based on the Gaussian Mixture formulation of the PHD filter, and preliminary simulation results toward extending existing approaches for RFS-based multi-target tracking to a decentralized multi-robot strategy for multi-target tracking. We validate this approach with simulations of multi-target tracking scenarios with different densities of robots and targets, and we evaluate the average time required for the robots in each scenario to reach agreement on a common set of targets.
Multi-Robot Target Search using Probabilistic Consensus on Discrete Markov Chains
Sep 20, 2020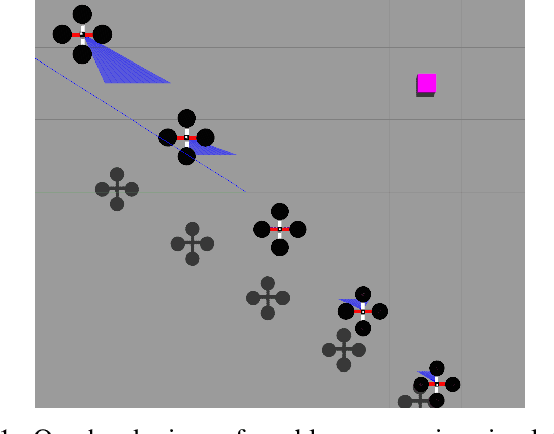
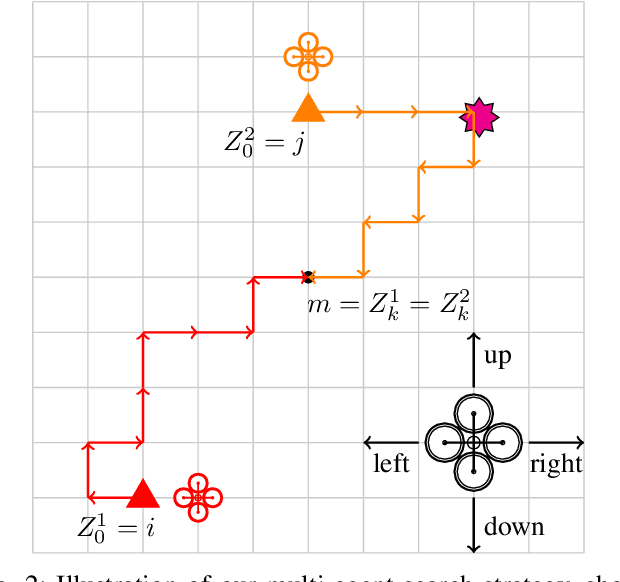
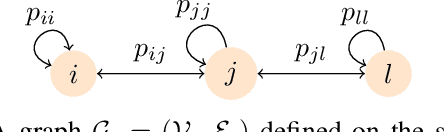
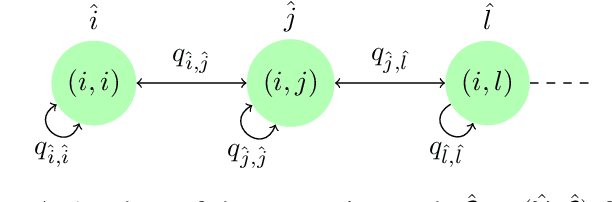
In this paper, we propose a probabilistic consensus-based multi-robot search strategy that is robust to communication link failures, and thus is suitable for disaster affected areas. The robots, capable of only local communication, explore a bounded environment according to a random walk modeled by a discrete-time discrete-state (DTDS) Markov chain and exchange information with neighboring robots, resulting in a time-varying communication network topology. The proposed strategy is proved to achieve consensus, here defined as agreement on the presence of a static target, with no assumptions on the connectivity of the communication network. Using numerical simulations, we investigate the effect of the robot population size, domain size, and information uncertainty on the consensus time statistics under this scheme. We also validate our theoretical results with 3D physics-based simulations in Gazebo. The simulations demonstrate that all robots achieve consensus in finite time with the proposed search strategy over a range of robot densities in the environment.