 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Optimization Annotation Pipeline and ALSS-YOLO-Seg for Efficient Banana Plantation Segmentation in UAV Imagery
Oct 09, 2024Precise segmentation of Unmanned Aerial Vehicle (UAV)-captured images plays a vital role in tasks such as crop yield estimation and plant health assessment in banana plantations. By identifying and classifying planted areas, crop area can be calculated, which is indispensable for accurate yield predictions. However, segmenting banana plantation scenes requires a substantial amount of annotated data, and manual labeling of these images is both time-consuming and labor-intensive, limiting the development of large-scale datasets. Furthermore, challenges such as changing target sizes, complex ground backgrounds, limited computational resources, and correct identification of crop categories make segmentation even more difficult. To address these issues, we proposed a comprehensive solution. Firstly, we designed an iterative optimization annotation pipeline leveraging SAM2's zero-shot capabilities to generate high-quality segmentation annotations, thereby reducing the cost and time associated with data annotation significantly. Secondly, we developed ALSS-YOLO-Seg, an efficient lightweight segmentation model optimized for UAV imagery. The model's backbone includes an Adaptive Lightweight Channel Splitting and Shuffling (ALSS) module to improve information exchange between channels and optimize feature extraction, aiding accurate crop identification. Additionally, a Multi-Scale Channel Attention (MSCA) module combines multi-scale feature extraction with channel attention to tackle challenges of varying target sizes and complex ground backgrounds.
Enhanced Multi-Robot SLAM System with Cross-Validation Matching and Exponential Threshold Keyframe Selection
Oct 07, 2024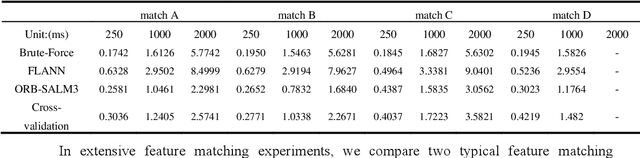


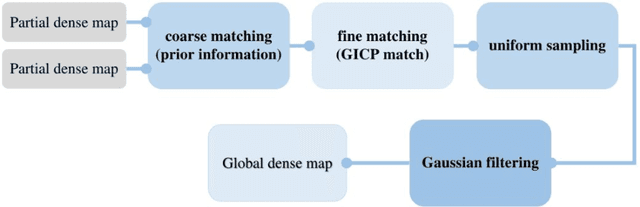
The evolving field of mobile robotics has indeed increased the demand for simultaneous localization and mapping (SLAM) systems. To augment the localization accuracy and mapping efficacy of SLAM, we refined the core module of the SLAM system. Within the feature matching phase, we introduced cross-validation matching to filter out mismatches. In the keyframe selection strategy, an exponential threshold function is constructed to quantify the keyframe selection process. Compared with a single robot, the multi-robot collaborative SLAM (CSLAM) system substantially improves task execution efficiency and robustness. By employing a centralized structure, we formulate a multi-robot SLAM system and design a coarse-to-fine matching approach for multi-map point cloud registration. Our system, built upon ORB-SLAM3, underwent extensive evaluation utilizing the TUM RGB-D, EuRoC MAV, and TUM_VI datasets. The experimental results demonstrate a significant improvement in the positioning accuracy and mapping quality of our enhanced algorithm compared to those of ORB-SLAM3, with a 12.90% reduction in the absolute trajectory error.
ALSS-YOLO: An Adaptive Lightweight Channel Split and Shuffling Network for TIR Wildlife Detection in UAV Imagery
Sep 10, 2024
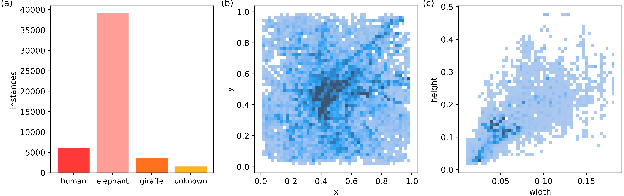
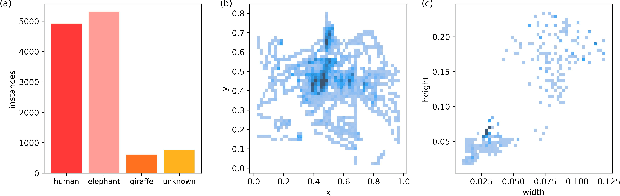
Unmanned aerial vehicles (UAVs) equipped with thermal infrared (TIR) cameras play a crucial role in combating nocturnal wildlife poaching. However, TIR images often face challenges such as jitter, and wildlife overlap, necessitating UAVs to possess the capability to identify blurred and overlapping small targets. Current traditional lightweight networks deployed on UAVs struggle to extract features from blurry small targets. To address this issue, we developed ALSS-YOLO, an efficient and lightweight detector optimized for TIR aerial images. Firstly, we propose a novel Adaptive Lightweight Channel Split and Shuffling (ALSS) module. This module employs an adaptive channel split strategy to optimize feature extraction and integrates a channel shuffling mechanism to enhance information exchange between channels. This improves the extraction of blurry features, crucial for handling jitter-induced blur and overlapping targets. Secondly, we developed a Lightweight Coordinate Attention (LCA) module that employs adaptive pooling and grouped convolution to integrate feature information across dimensions. This module ensures lightweight operation while maintaining high detection precision and robustness against jitter and target overlap. Additionally, we developed a single-channel focus module to aggregate the width and height information of each channel into four-dimensional channel fusion, which improves the feature representation efficiency of infrared images. Finally, we modify the localization loss function to emphasize the loss value associated with small objects to improve localization accuracy. Extensive experiments on the BIRDSAI and ISOD TIR UAV wildlife datasets show that ALSS-YOLO achieves state-of-the-art performance, Our code is openly available at https://github.com/helloworlder8/computer_vision.