 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeALSS-YOLO: An Adaptive Lightweight Channel Split and Shuffling Network for TIR Wildlife Detection in UAV Imagery
Paper and Code
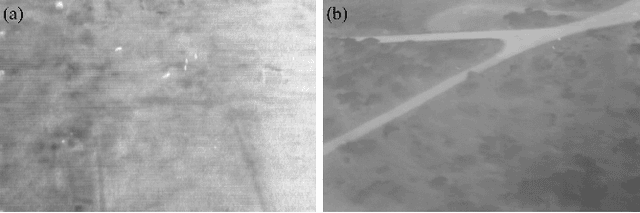
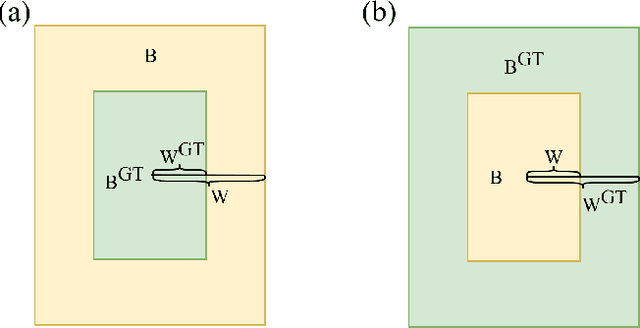
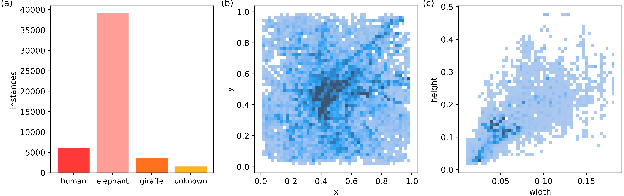
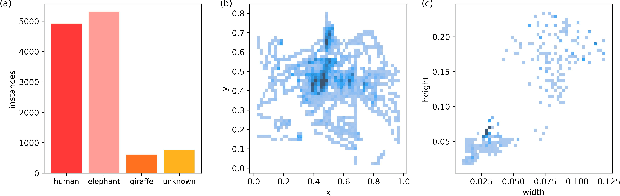
Unmanned aerial vehicles (UAVs) equipped with thermal infrared (TIR) cameras play a crucial role in combating nocturnal wildlife poaching. However, TIR images often face challenges such as jitter, and wildlife overlap, necessitating UAVs to possess the capability to identify blurred and overlapping small targets. Current traditional lightweight networks deployed on UAVs struggle to extract features from blurry small targets. To address this issue, we developed ALSS-YOLO, an efficient and lightweight detector optimized for TIR aerial images. Firstly, we propose a novel Adaptive Lightweight Channel Split and Shuffling (ALSS) module. This module employs an adaptive channel split strategy to optimize feature extraction and integrates a channel shuffling mechanism to enhance information exchange between channels. This improves the extraction of blurry features, crucial for handling jitter-induced blur and overlapping targets. Secondly, we developed a Lightweight Coordinate Attention (LCA) module that employs adaptive pooling and grouped convolution to integrate feature information across dimensions. This module ensures lightweight operation while maintaining high detection precision and robustness against jitter and target overlap. Additionally, we developed a single-channel focus module to aggregate the width and height information of each channel into four-dimensional channel fusion, which improves the feature representation efficiency of infrared images. Finally, we modify the localization loss function to emphasize the loss value associated with small objects to improve localization accuracy. Extensive experiments on the BIRDSAI and ISOD TIR UAV wildlife datasets show that ALSS-YOLO achieves state-of-the-art performance, Our code is openly available at https://github.com/helloworlder8/computer_vision.