 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Traffic Element-Based Streetlight Control Using Neighbor Discovery Algorithm Based on IoT Events
Dec 02, 2024Intelligent streetlight systems divide the streetlight network into multiple sectors, activating only the streetlights in the corresponding sectors when traffic elements pass by, rather than all streetlights, effectively reducing energy waste. This strategy requires streetlights to understand their neighbor relationships to illuminate only the streetlights in their respective sectors. However, manually configuring the neighbor relationships for a large number of streetlights in complex large-scale road streetlight networks is cumbersome and prone to errors. Due to the crisscrossing nature of roads, it is also difficult to determine the neighbor relationships using GPS or communication positioning. In response to these issues, this article proposes a systematic approach to model the streetlight network as a social network and construct a neighbor relationship probabilistic graph using IoT event records of streetlights detecting traffic elements. Based on this, a multi-objective genetic algorithm based probabilistic graph clustering method is designed to discover the neighbor relationships of streetlights. Considering the characteristic that pedestrians and vehicles usually move at a constant speed on a section of a road, speed consistency is introduced as an optimization objective, which, together with traditional similarity measures, forms a multi-objective function, enhancing the accuracy of neighbor relationship discovery. Extensive experiments on simulation datasets were conducted, comparing the proposed algorithm with other probabilistic graph clustering algorithms. The results demonstrate that the proposed algorithm can more accurately identify the neighbor relationships of streetlights compared to other algorithms, effectively achieving adaptive streetlight control for traffic elements.
ALSS-YOLO: An Adaptive Lightweight Channel Split and Shuffling Network for TIR Wildlife Detection in UAV Imagery
Sep 10, 2024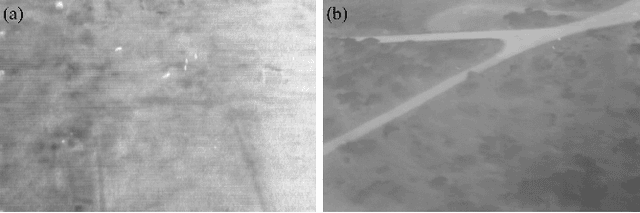
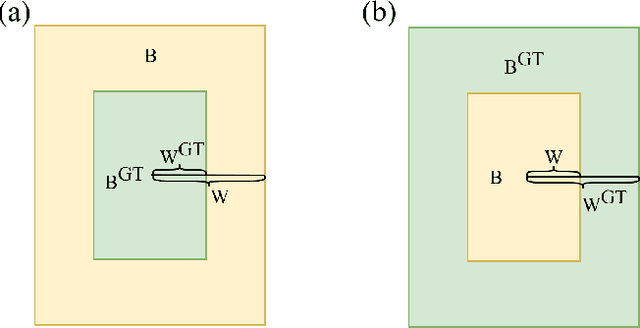
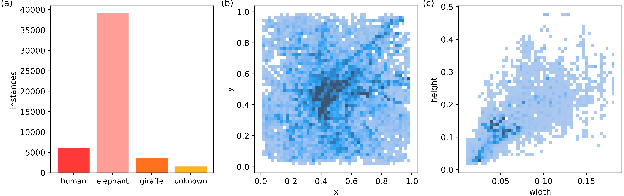
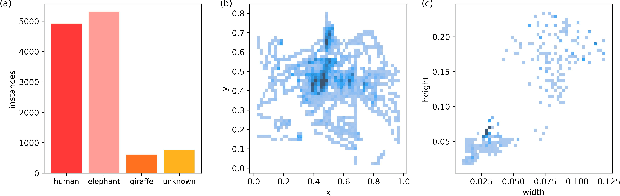
Unmanned aerial vehicles (UAVs) equipped with thermal infrared (TIR) cameras play a crucial role in combating nocturnal wildlife poaching. However, TIR images often face challenges such as jitter, and wildlife overlap, necessitating UAVs to possess the capability to identify blurred and overlapping small targets. Current traditional lightweight networks deployed on UAVs struggle to extract features from blurry small targets. To address this issue, we developed ALSS-YOLO, an efficient and lightweight detector optimized for TIR aerial images. Firstly, we propose a novel Adaptive Lightweight Channel Split and Shuffling (ALSS) module. This module employs an adaptive channel split strategy to optimize feature extraction and integrates a channel shuffling mechanism to enhance information exchange between channels. This improves the extraction of blurry features, crucial for handling jitter-induced blur and overlapping targets. Secondly, we developed a Lightweight Coordinate Attention (LCA) module that employs adaptive pooling and grouped convolution to integrate feature information across dimensions. This module ensures lightweight operation while maintaining high detection precision and robustness against jitter and target overlap. Additionally, we developed a single-channel focus module to aggregate the width and height information of each channel into four-dimensional channel fusion, which improves the feature representation efficiency of infrared images. Finally, we modify the localization loss function to emphasize the loss value associated with small objects to improve localization accuracy. Extensive experiments on the BIRDSAI and ISOD TIR UAV wildlife datasets show that ALSS-YOLO achieves state-of-the-art performance, Our code is openly available at https://github.com/helloworlder8/computer_vision.