Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Free Safety-Critical Control for Robotic Systems
Sep 19, 2021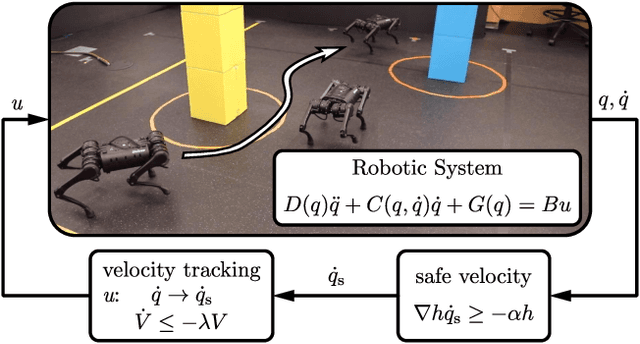
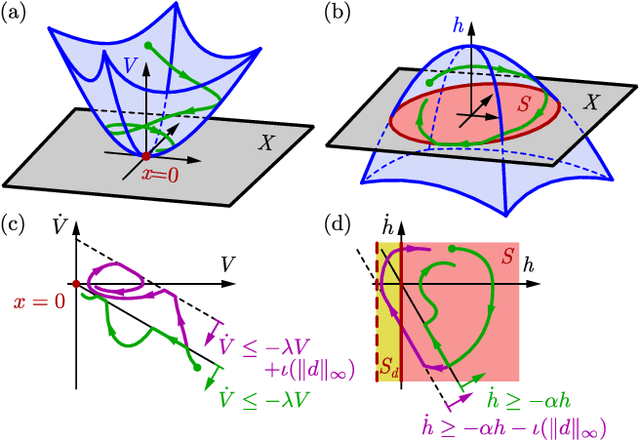
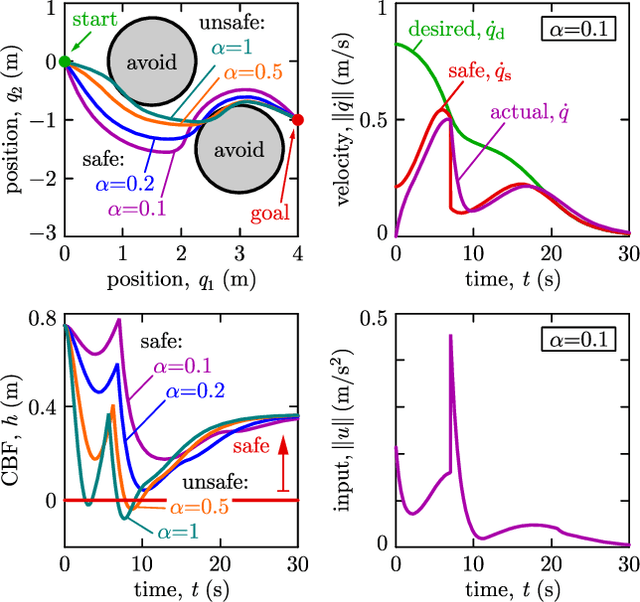
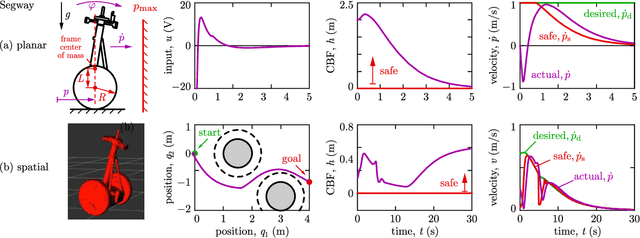
This paper presents a framework for the safety-critical control of robotic systems, when safety is defined on safe regions in the configuration space. To maintain safety, we synthesize a safe velocity based on control barrier function theory without relying on a -- potentially complicated -- high-fidelity dynamical model of the robot. Then, we track the safe velocity with a tracking controller. This culminates in model-free safety critical control. We prove theoretical safety guarantees for the proposed method. Finally, we demonstrate that this approach is application-agnostic. We execute an obstacle avoidance task with a Segway in high-fidelity simulation, as well as with a Drone and a Quadruped in hardware experiments.
* Submitted to the IEEE Robotics and Automation Letters (RA-L) and the
2022 IEEE International Conference on Robotics and Automation (ICRA). 8
pages, 5 figures
Via