 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Oriented Robot-Human Handovers on Legged Manipulators
Feb 05, 2026Task-oriented handovers (TOH) are fundamental to effective human-robot collaboration, requiring robots to present objects in a way that supports the human's intended post-handover use. Existing approaches are typically based on object- or task-specific affordances, but their ability to generalize to novel scenarios is limited. To address this gap, we present AFT-Handover, a framework that integrates large language model (LLM)-driven affordance reasoning with efficient texture-based affordance transfer to achieve zero-shot, generalizable TOH. Given a novel object-task pair, the method retrieves a proxy exemplar from a database, establishes part-level correspondences via LLM reasoning, and texturizes affordances for feature-based point cloud transfer. We evaluate AFT-Handover across diverse task-object pairs, showing improved handover success rates and stronger generalization compared to baselines. In a comparative user study, our framework is significantly preferred over the current state-of-the-art, effectively reducing human regrasping before tool use. Finally, we demonstrate TOH on legged manipulators, highlighting the potential of our framework for real-world robot-human handovers.
Collision detection and identification for a legged manipulator
Jul 29, 2022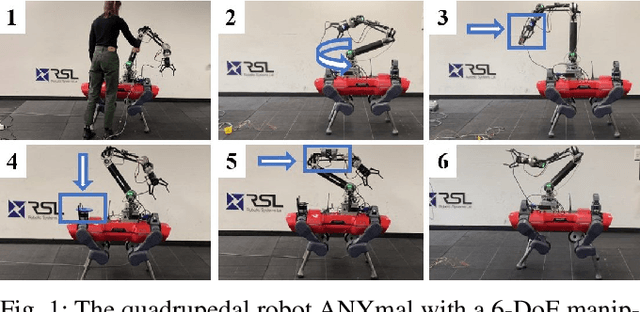

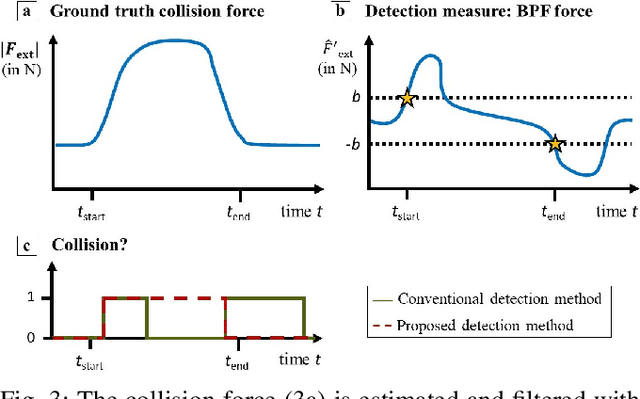
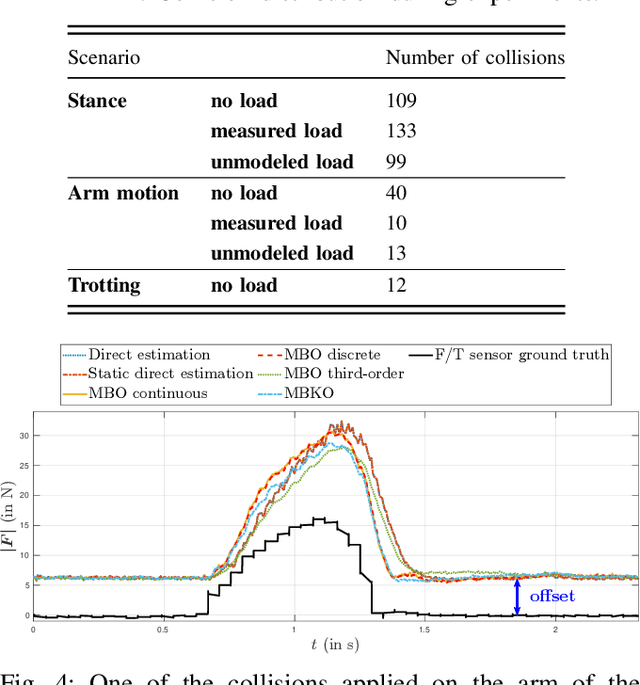
To safely deploy legged robots in the real world it is necessary to provide them with the ability to reliably detect unexpected contacts and accurately estimate the corresponding contact force. In this paper, we propose a collision detection and identification pipeline for a quadrupedal manipulator. We first introduce an approach to estimate the collision time span based on band-pass filtering and show that this information is key for obtaining accurate collision force estimates. We then improve the accuracy of the identified force magnitude by compensating for model inaccuracies, unmodeled loads, and any other potential source of quasi-static disturbances acting on the robot. We validate our framework with extensive hardware experiments in various scenarios, including trotting and additional unmodeled load on the robot.