 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision detection and identification for a legged manipulator
Paper and Code
Jul 29, 2022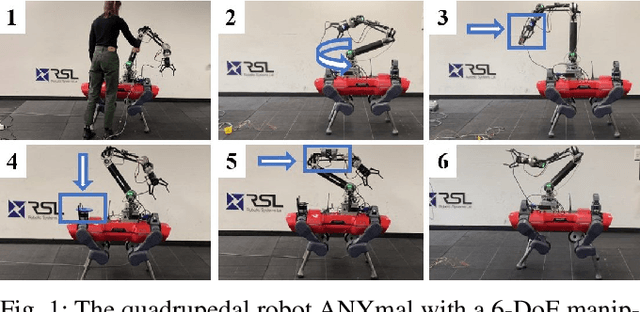

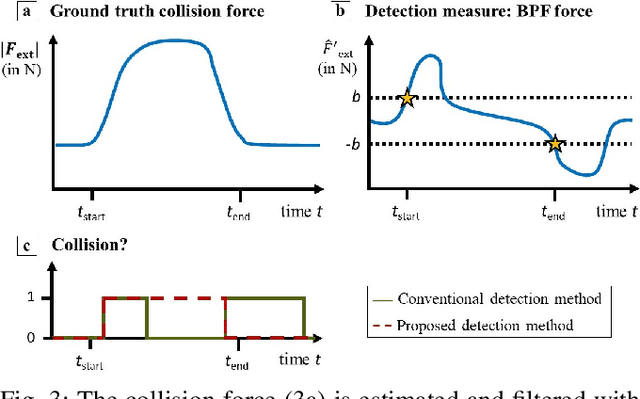
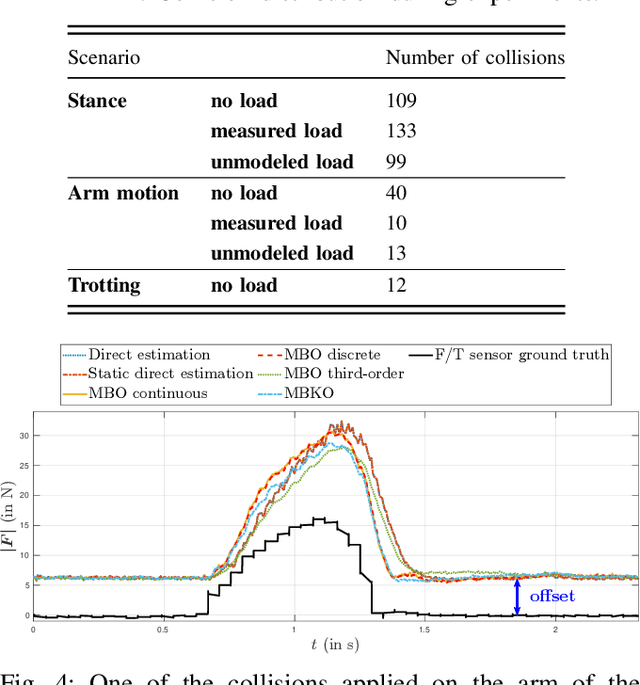
To safely deploy legged robots in the real world it is necessary to provide them with the ability to reliably detect unexpected contacts and accurately estimate the corresponding contact force. In this paper, we propose a collision detection and identification pipeline for a quadrupedal manipulator. We first introduce an approach to estimate the collision time span based on band-pass filtering and show that this information is key for obtaining accurate collision force estimates. We then improve the accuracy of the identified force magnitude by compensating for model inaccuracies, unmodeled loads, and any other potential source of quasi-static disturbances acting on the robot. We validate our framework with extensive hardware experiments in various scenarios, including trotting and additional unmodeled load on the robot.