 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTE-ETH: Lower Bounds for QBFs of Bounded Treewidth
Oct 02, 2019
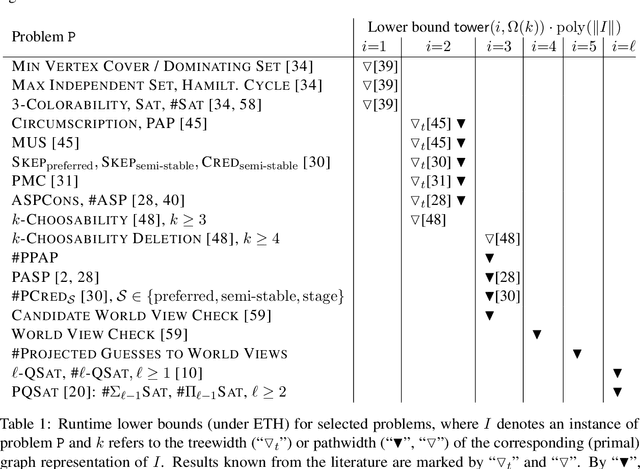
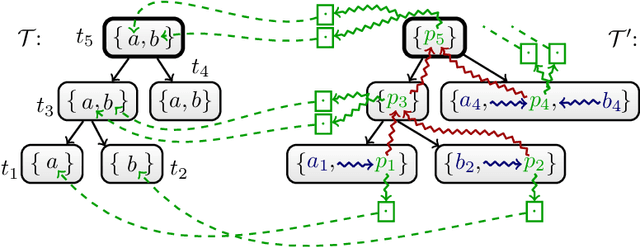
The problem of deciding the validity (QSAT) of quantified Boolean formulas (QBF) is a vivid research area in both theory and practice. In the field of parameterized algorithmics, the well-studied graph measure treewidth turned out to be a successful parameter. A well-known result by Chen in parameterized complexity is that QSAT when parameterized by the treewidth of the primal graph of the input formula together with the quantifier depth of the formula is fixed-parameter tractable. More precisely, the runtime of such an algorithm is polynomial in the formula size and exponential in the treewidth, where the exponential function in the treewidth is a tower, whose height is the quantifier depth. A natural question is whether one can significantly improve these results and decrease the tower while assuming the Exponential Time Hypothesis (ETH). In the last years, there has been a growing interest in the quest of establishing lower bounds under ETH, showing mostly problem-specific lower bounds up to the third level of the polynomial hierarchy. Still, an important question is to settle this as general as possible and to cover the whole polynomial hierarchy. In this work, we show lower bounds based on the ETH for arbitrary QBFs parameterized by treewidth (and quantifier depth). More formally, we establish lower bounds for QSAT and treewidth, namely, that under ETH there cannot be an algorithm that solves QSAT of quantifier depth i in runtime significantly better than i-fold exponential in the treewidth and polynomial in the input size. In doing so, we provide a versatile reduction technique to compress treewidth that encodes the essence of dynamic programming on arbitrary tree decompositions. Further, we describe a general methodology for a more fine-grained analysis of problems parameterized by treewidth that are at higher levels of the polynomial hierarchy.
Conformant Planning as a Case Study of Incremental QBF Solving
Apr 04, 2016



We consider planning with uncertainty in the initial state as a case study of incremental quantified Boolean formula (QBF) solving. We report on experiments with a workflow to incrementally encode a planning instance into a sequence of QBFs. To solve this sequence of incrementally constructed QBFs, we use our general-purpose incremental QBF solver DepQBF. Since the generated QBFs have many clauses and variables in common, our approach avoids redundancy both in the encoding phase and in the solving phase. Experimental results show that incremental QBF solving outperforms non-incremental QBF solving. Our results are the first empirical study of incremental QBF solving in the context of planning and motivate its use in other application domains.
Backdoors to Abduction
Apr 22, 2013Abductive reasoning (or Abduction, for short) is among the most fundamental AI reasoning methods, with a broad range of applications, including fault diagnosis, belief revision, and automated planning. Unfortunately, Abduction is of high computational complexity; even propositional Abduction is \Sigma_2^P-complete and thus harder than NP and coNP. This complexity barrier rules out the existence of a polynomial transformation to propositional satisfiability (SAT). In this work we use structural properties of the Abduction instance to break this complexity barrier. We utilize the problem structure in terms of small backdoor sets. We present fixed-parameter tractable transformations from Abduction to SAT, which make the power of today's SAT solvers available to Abduction.