 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdapting Robot's Explanation for Failures Based on Observed Human Behavior in Human-Robot Collaboration
Apr 13, 2025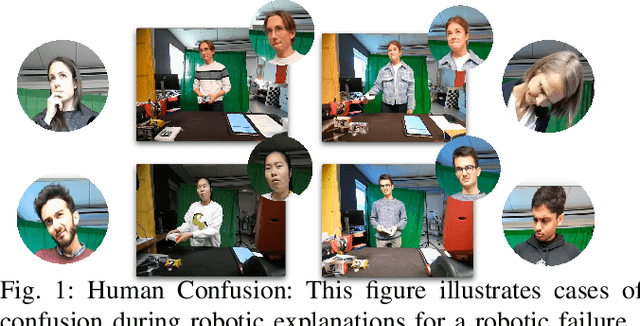
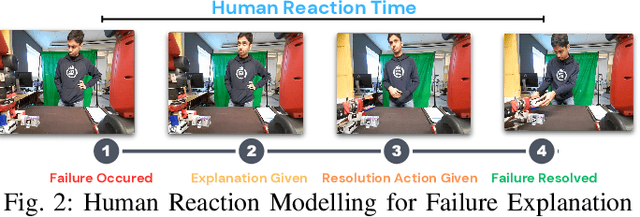
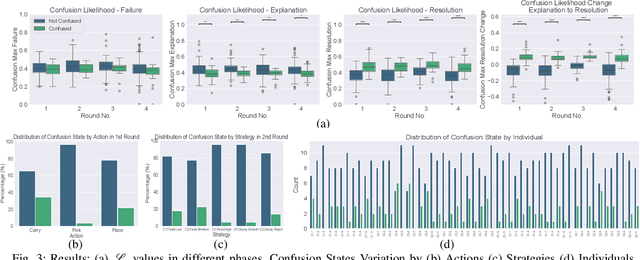
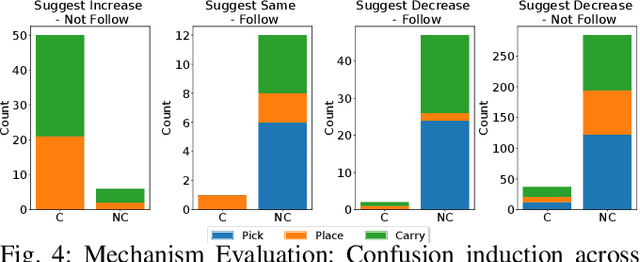
This work aims to interpret human behavior to anticipate potential user confusion when a robot provides explanations for failure, allowing the robot to adapt its explanations for more natural and efficient collaboration. Using a dataset that included facial emotion detection, eye gaze estimation, and gestures from 55 participants in a user study, we analyzed how human behavior changed in response to different types of failures and varying explanation levels. Our goal is to assess whether human collaborators are ready to accept less detailed explanations without inducing confusion. We formulate a data-driven predictor to predict human confusion during robot failure explanations. We also propose and evaluate a mechanism, based on the predictor, to adapt the explanation level according to observed human behavior. The promising results from this evaluation indicate the potential of this research in adapting a robot's explanations for failures to enhance the collaborative experience.
REFLEX Dataset: A Multimodal Dataset of Human Reactions to Robot Failures and Explanations
Feb 20, 2025This work presents REFLEX: Robotic Explanations to FaiLures and Human EXpressions, a comprehensive multimodal dataset capturing human reactions to robot failures and subsequent explanations in collaborative settings. It aims to facilitate research into human-robot interaction dynamics, addressing the need to study reactions to both initial failures and explanations, as well as the evolution of these reactions in long-term interactions. By providing rich, annotated data on human responses to different types of failures, explanation levels, and explanation varying strategies, the dataset contributes to the development of more robust, adaptive, and satisfying robotic systems capable of maintaining positive relationships with human collaborators, even during challenges like repeated failures.