 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving rigid 3D calibration for robotic surgery
Jul 16, 2020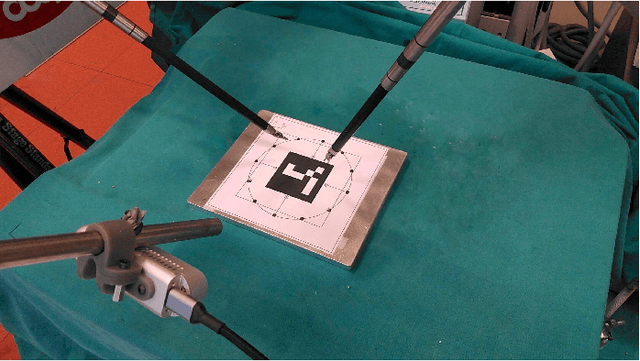
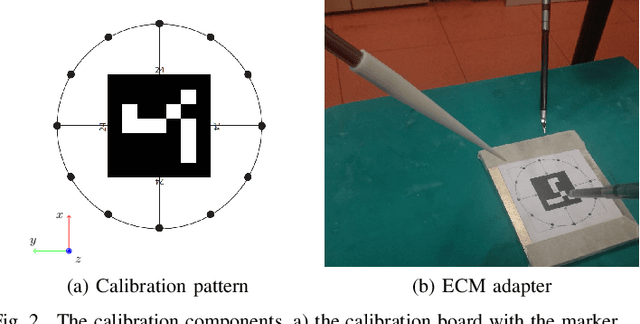
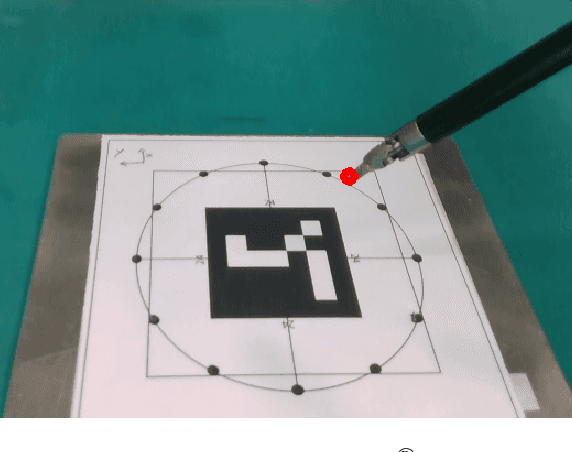
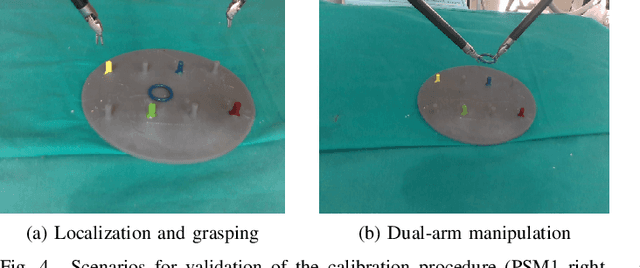
Autonomy is the frontier of research in robotic surgery and its aim is to improve the quality of surgical procedures in the next future. One fundamental requirement for autonomy is advanced perception capability through vision sensors. In this paper, we propose a novel calibration technique for a surgical scenario with da Vinci robot. Calibration of the camera and the robot is necessary for precise positioning of the tools in order to emulate the high performance surgeons. Our calibration technique is tailored for RGB-D camera. Different tests performed on relevant use cases for surgery prove that we significantly improve precision and accuracy with respect to the state of the art solutions for similar devices on a surgical-size setup. Moreover, our calibration method can be easily extended to standard surgical endoscope to prompt its use in real surgical scenario.
Dynamic Movement Primitives: Volumetric Obstacle Avoidance Using Dynamic Potential Functions
Jul 01, 2020



Obstacle avoidance for DMPs is still a challenging problem. In our previous work, we proposed a framework for obstacle avoidance based on superquadric potential functions to represent volumes. In this work, we extend our previous work to include the velocity of the trajectory in the definition of the potential. Our formulations guarantee smoother behavior with respect to state-of-the-art point-like methods. Moreover, our new formulation allows to obtain a smoother behavior in proximity of the obstacle than when using a static (i.e. velocity independent) potential. We validate our framework for obstacle avoidance in a simulated multi-robot scenario and with different real robots: a pick-and-place task for an industrial manipulator and a surgical robot to show scalability; and navigation with a mobile robot in dynamic environment.
Autonomous task planning and situation awareness in robotic surgery
Apr 19, 2020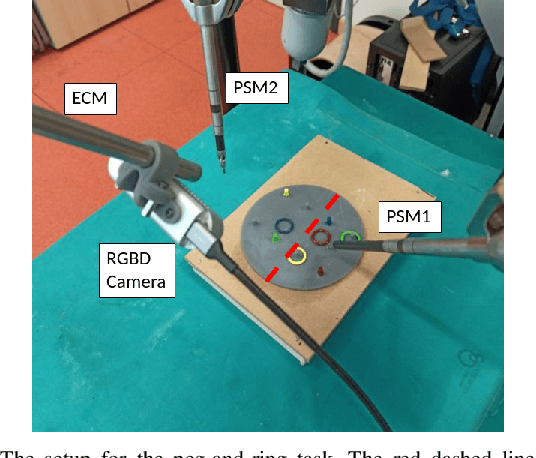



The use of robots in minimally invasive surgery has improved the quality of standard surgical procedures. So far, only the automation of simple surgical actions has been investigated by researchers, while the execution of structured tasks requiring reasoning on the environment and the choice among multiple actions is still managed by human surgeons. In this paper, we propose a framework to implement surgical task automation. The framework consists of a task-level reasoning module based on answer set programming, a low-level motion planning module based on dynamic movement primitives, and a situation awareness module. The logic-based reasoning module generates explainable plans and is able to recover from failure conditions, which are identified and explained by the situation awareness module interfacing to a human supervisor, for enhanced safety. Dynamic Movement Primitives allow to replicate the dexterity of surgeons and to adapt to obstacles and changes in the environment. The framework is validated on different versions of the standard surgical training peg-and-ring task.