 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Arm Construction Robot for Automatic Fixation of Structural Parts to Concrete Surfaces in Narrow Environments
Mar 29, 2024

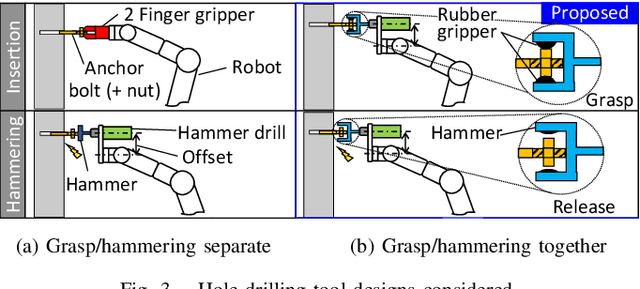
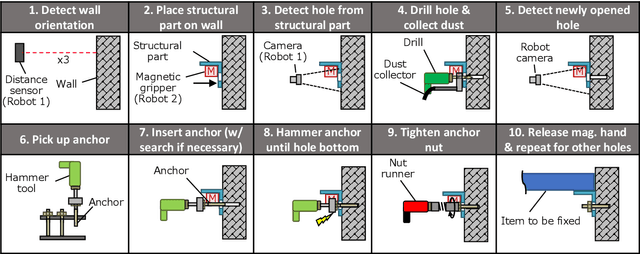
Fixation of structural parts to concrete is a repetitive, heavy-duty, and time-consuming task that requires automation due to the lack of skilled construction workers. Previously developed automation techniques have not achieved the complete fixation of structural parts and are difficult to implement in narrow construction environments. In this study, we propose a construction robot system that enables the complete installation of structural parts to concrete and can be easily introduced to unstructured and narrow construction environments. The system includes two arms that simultaneously position and fix the structural parts, and custom tools that reduce the reaction force applied to the robots so that smaller robots can be used with lower payloads. Due to the modular design of the proposed system, it can be transported in parts for easy introduction to the construction environment. We also propose a procedure for fixing structural parts. Experimental results demonstrate that the custom tools make it possible to use smaller robots without moment overload in the robot joints. Moreover, the results show that the proposed robot system and fixation procedure enable automatic fixation of a structural part to concrete.
* Published in 2023 IEEE/SICE International Symposium on System Integration (SII) on 17 January 2023
A Peg-in-hole Task Strategy for Holes in Concrete
Mar 29, 2024



A method that enables an industrial robot to accomplish the peg-in-hole task for holes in concrete is proposed. The proposed method involves slightly detaching the peg from the wall, when moving between search positions, to avoid the negative influence of the concrete's high friction coefficient. It uses a deep neural network (DNN), trained via reinforcement learning, to effectively find holes with variable shape and surface finish (due to the brittle nature of concrete) without analytical modeling or control parameter tuning. The method uses displacement of the peg toward the wall surface, in addition to force and torque, as one of the inputs of the DNN. Since the displacement increases as the peg gets closer to the hole (due to the chamfered shape of holes in concrete), it is a useful parameter for inputting in the DNN. The proposed method was evaluated by training the DNN on a hole 500 times and attempting to find 12 unknown holes. The results of the evaluation show the DNN enabled a robot to find the unknown holes with average success rate of 96.1% and average execution time of 12.5 seconds. Additional evaluations with random initial positions and a different type of peg demonstrate the trained DNN can generalize well to different conditions. Analyses of the influence of the peg displacement input showed the success rate of the DNN is increased by utilizing this parameter. These results validate the proposed method in terms of its effectiveness and applicability to the construction industry.
* Published in 2021 IEEE International Conference on Robotics and Automation (ICRA) on 30 May 2021
Visual Spatial Attention and Proprioceptive Data-Driven Reinforcement Learning for Robust Peg-in-Hole Task Under Variable Conditions
Dec 27, 2023Anchor-bolt insertion is a peg-in-hole task performed in the construction field for holes in concrete. Efforts have been made to automate this task, but the variable lighting and hole surface conditions, as well as the requirements for short setup and task execution time make the automation challenging. In this study, we introduce a vision and proprioceptive data-driven robot control model for this task that is robust to challenging lighting and hole surface conditions. This model consists of a spatial attention point network (SAP) and a deep reinforcement learning (DRL) policy that are trained jointly end-to-end to control the robot. The model is trained in an offline manner, with a sample-efficient framework designed to reduce training time and minimize the reality gap when transferring the model to the physical world. Through evaluations with an industrial robot performing the task in 12 unknown holes, starting from 16 different initial positions, and under three different lighting conditions (two with misleading shadows), we demonstrate that SAP can generate relevant attention points of the image even in challenging lighting conditions. We also show that the proposed model enables task execution with higher success rate and shorter task completion time than various baselines. Due to the proposed model's high effectiveness even in severe lighting, initial positions, and hole conditions, and the offline training framework's high sample-efficiency and short training time, this approach can be easily applied to construction.
* Published in IEEE Robotics and Automation Letters in 08 February 2023