 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePaper index: Designing an introductory HRI course (workshop at HRI 2024)
Mar 04, 2024Human-robot interaction is now an established discipline. Dozens of HRI courses exist at universities worldwide, and some institutions even offer degrees in HRI. However, although many students are being taught HRI, there is no agreed-upon curriculum for an introductory HRI course. In this workshop, we aimed to reach community consensus on what should be covered in such a course. Through interactive activities like panels, breakout discussions, and syllabus design, workshop participants explored the many topics and pedagogical approaches for teaching HRI. This collection of articles submitted to the workshop provides examples of HRI courses being offered worldwide.
Perceived Safety in Physical Human Robot Interaction -- A Survey
May 30, 2021
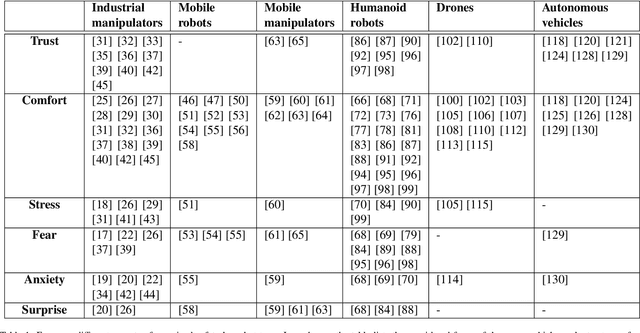
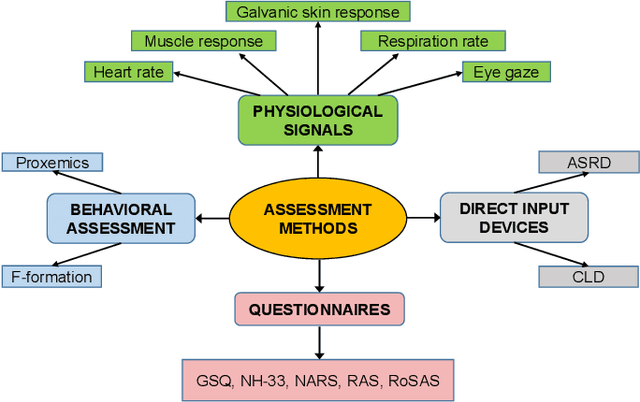
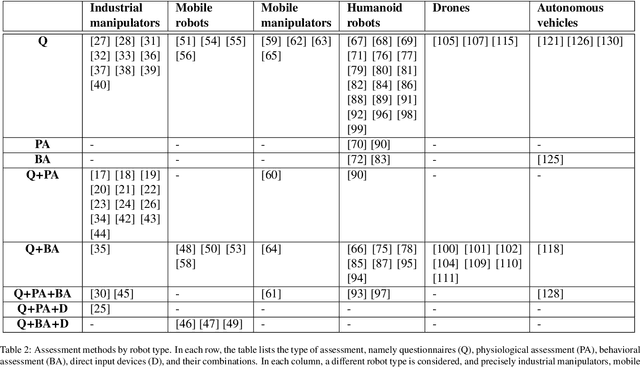
This review paper focuses on different aspects of perceived safety for a number of autonomous physical systems. This is a major aspect of robotics research, as more and more applications allow human and autonomous systems to share their space, with crucial implications both on safety and on its perception. The alternative terms used to express related concepts (e.g., psychological safety, trust, comfort, stress, fear, and anxiety) are listed and explained. Then, the available methods to assess perceived safety (i.e., questionnaires, physiological measurements, behavioral assessment, and direct input devices) are described. Six categories of autonomous systems are considered (industrial manipulators, mobile robots, mobile manipulators, humanoid robots, drones, and autonomous vehicles), providing an overview of the main themes related to perceived safety in the specific domain, a description of selected works, and an analysis of how motion and characteristics of the system influence the perception of safety. The survey also discusses experimental duration and location of the reviewed papers as well as identified trends over time.