 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceived Safety in Physical Human Robot Interaction -- A Survey
May 30, 2021
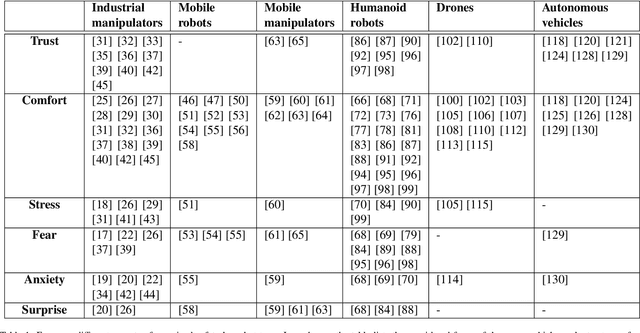
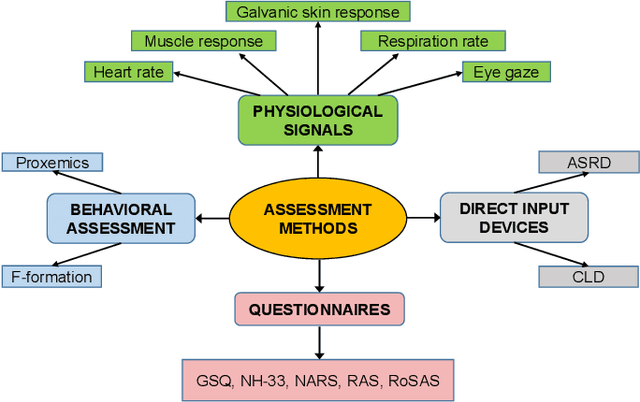
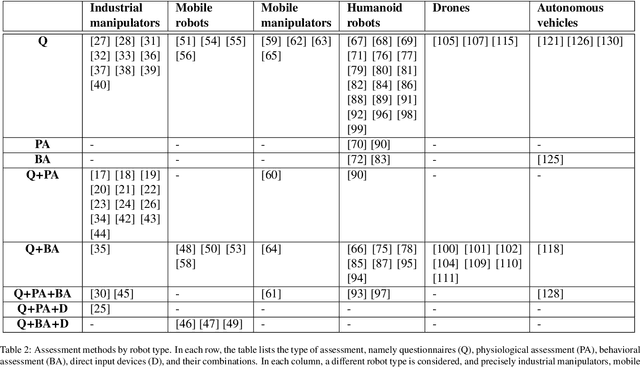
This review paper focuses on different aspects of perceived safety for a number of autonomous physical systems. This is a major aspect of robotics research, as more and more applications allow human and autonomous systems to share their space, with crucial implications both on safety and on its perception. The alternative terms used to express related concepts (e.g., psychological safety, trust, comfort, stress, fear, and anxiety) are listed and explained. Then, the available methods to assess perceived safety (i.e., questionnaires, physiological measurements, behavioral assessment, and direct input devices) are described. Six categories of autonomous systems are considered (industrial manipulators, mobile robots, mobile manipulators, humanoid robots, drones, and autonomous vehicles), providing an overview of the main themes related to perceived safety in the specific domain, a description of selected works, and an analysis of how motion and characteristics of the system influence the perception of safety. The survey also discusses experimental duration and location of the reviewed papers as well as identified trends over time.
End-to-End Deep Fault Tolerant Control
May 28, 2021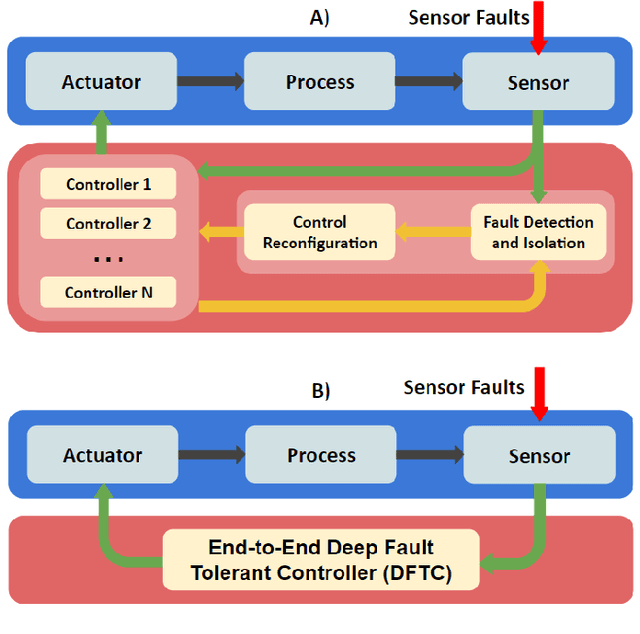
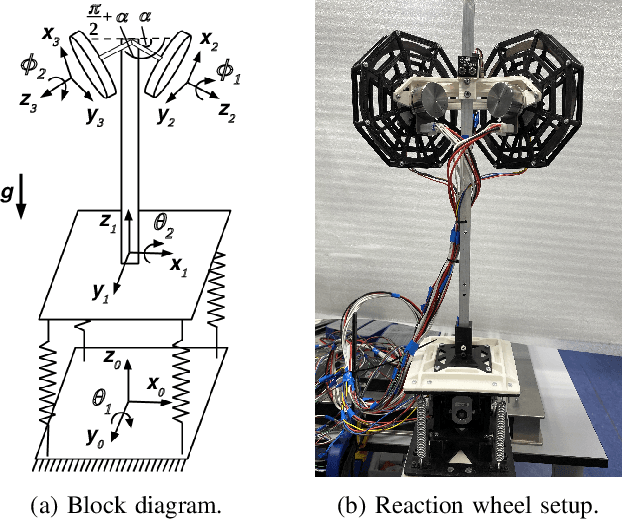
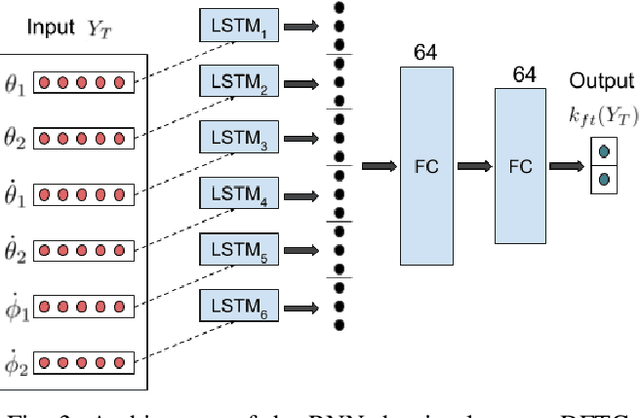
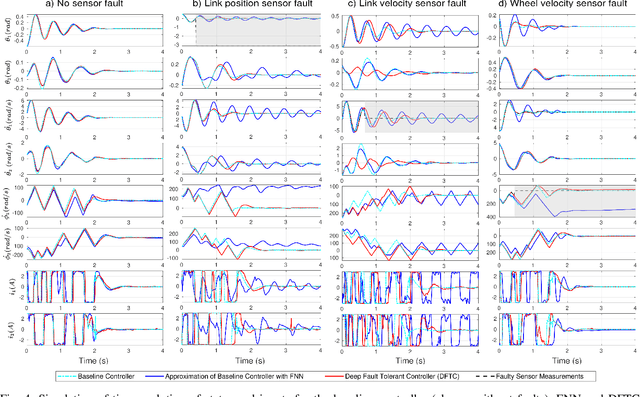
Ideally, accurate sensor measurements are needed to achieve a good performance in the closed-loop control of mechatronic systems. As a consequence, sensor faults will prevent the system from working correctly, unless a fault-tolerant control (FTC) architecture is adopted. As model-based FTC algorithms for nonlinear systems are often challenging to design, this paper focuses on a new method for FTC in the presence of sensor faults, based on deep learning. The considered approach replaces the phases of fault detection and isolation and controller design with a single recurrent neural network, which has the value of past sensor measurements in a given time window as input, and the current values of the control variables as output. This end-to-end deep FTC method is applied to a mechatronic system composed of a spherical inverted pendulum, whose configuration is changed via reaction wheels, in turn actuated by electric motors. The simulation and experimental results show that the proposed method can handle abrupt faults occurring in link position/velocity sensors. The provided supplementary material includes a video of real-world experiments and the software source code.