 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssigning Optimal Integer Harmonic Periods to Hard Real Time Tasks
Feb 07, 2023Selecting period values for tasks is a very important step in the design process of a real-time system, especially due to the significance of its impact on system schedulability. It is well known that, under RMS, the utilization bound for a harmonic task set is 100%. Also, polynomial-time algorithms have been developed for response-time analysis of harmonic task sets. In practice, the largest acceptable value for the period of a task is determined by the performance and safety requirements of the application. In this paper, we address the problem of assigning harmonic periods to a task set such that every task gets assigned an integer period less than or equal to its application specified upper bound and the task utilization of every task is less than 1. We focus on integer solutions given the discrete nature of time in real-time computer systems. We first express this problem of assigning harmonic periods to a task set as a discrete piecewise optimization problem. We then present the 'Discrete Piecewise Harmonic Search' (DPHS) algorithm that outputs an optimal harmonic task assignment. We then define conditions for a metric to be rational for harmonization. We show that commonly used metrics like, the total percentage error (TPE), total system utilization (TSU), first order error (FOE), and maximum percentage error (MPE), are rational. We next prove that the DPHS algorithm finds the optimal feasible assignment, if one exists, for these rational metrics. We apply the DPHS algorithm to harmonize task sets used in real-world applications to highlight its benefits. We compare the performance of the DPHS algorithm against a brute-force search and find that the DPHS searches up to 94\% fewer task sets than the brute-force search that obtains the optimal solution.
MultiCruise: Eco-Lane Selection Strategy with Eco-Cruise Control for Connected and Automated Vehicles
Apr 24, 2021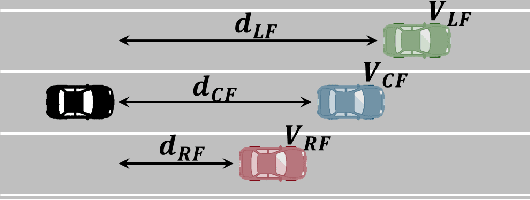
Connected and Automated Vehicles (CAVs) have real-time information from the surrounding environment by using local on-board sensors, V2X (Vehicle-to-Everything) communications, pre-loaded vehicle-specific lookup tables, and map database. CAVs are capable of improving energy efficiency by incorporating these information. In particular, Eco-Cruise and Eco-Lane Selection on highways and/or motorways have immense potential to save energy, because there are generally fewer traffic controllers and the vehicles keep moving in general. In this paper, we present a cooperative and energy-efficient lane-selection strategy named MultiCruise, where each CAV selects one among multiple candidate lanes that allows the most energy-efficient travel. MultiCruise incorporates an Eco-Cruise component to select the most energy-efficient lane. The Eco-Cruise component calculates the driving parameters and prospective energy consumption of the ego vehicle for each candidate lane, and the Eco-Lane Selection component uses these values. As a result, MultiCruise can account for multiple data sources, such as the road curvature and the surrounding vehicles' velocities and accelerations. The eco-autonomous driving strategy, MultiCruise, is tested, designed and verified by using a co-simulation test platform that includes autonomous driving software and realistic road networks to study the performance under realistic driving conditions. Our experimental evaluations show that our eco-autonomous MultiCruise saves up to 8.5% fuel consumption.
Co-simulation Platform for Developing InfoRich Energy-Efficient Connected and Automated Vehicles
Apr 16, 2020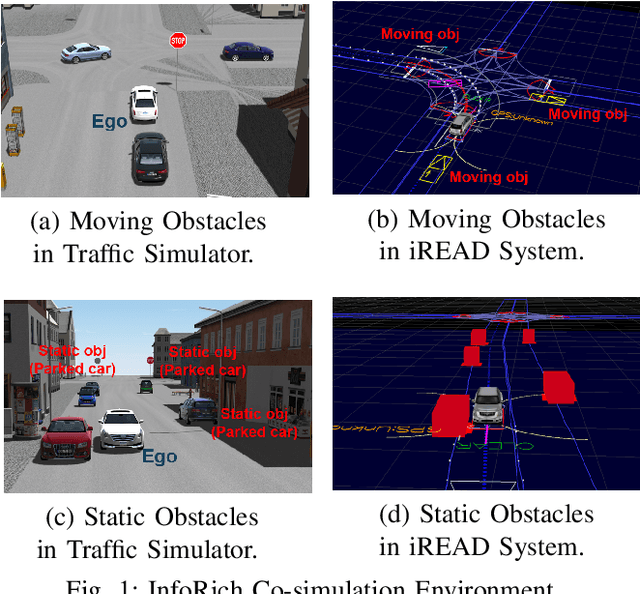
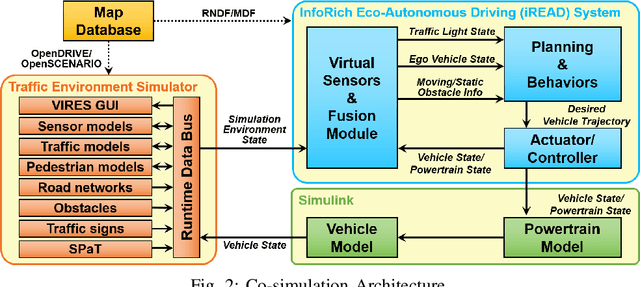
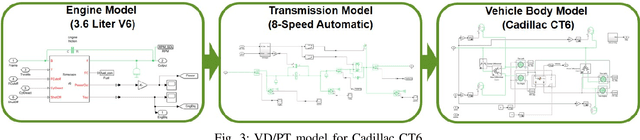
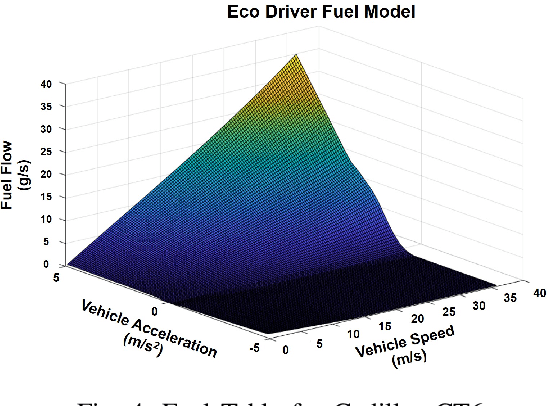
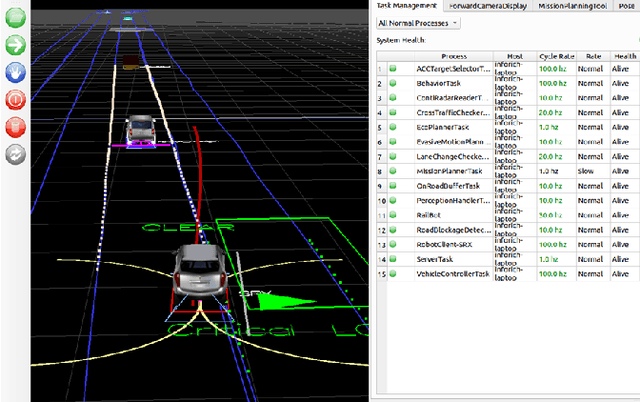
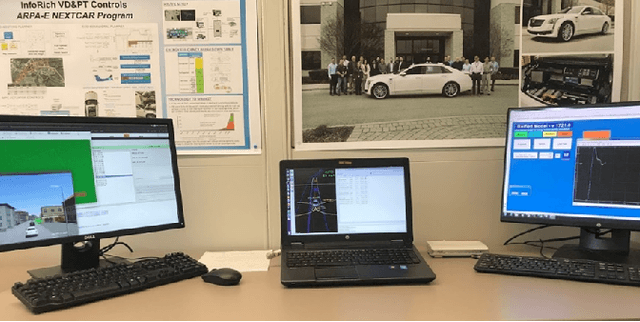
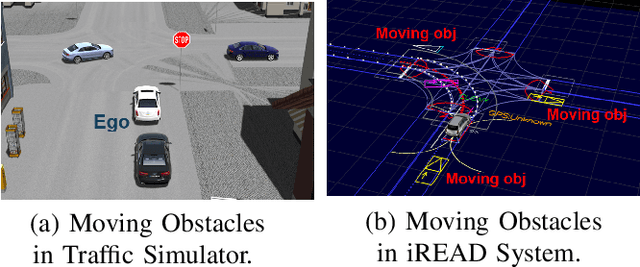
With advances in sensing, computing, and communication technologies, Connected and Automated Vehicles (CAVs) are becoming feasible. The advent of CAVs presents new opportunities to improve the energy efficiency of individual vehicles. However, testing and verifying energy-efficient autonomous driving systems are difficult due to safety considerations and repeatability. In this paper, we present a co-simulation platform to develop and test novel vehicle eco-autonomous driving technologies named InfoRich, which incorporates the information from on-board sensors, V2X communications, and map database. The co-simulation platform includes eco-autonomous driving software, vehicle dynamics and powertrain (VD&PT) model, and a traffic environment simulator. Also, we utilize synthetic drive cycles derived from real-world driving data to test the strategies under realistic driving scenarios. To build road networks from the real-world driving data, we develop an Automated Parser and Calculator for Map/Scenario named AutoPASCAL. Overall, the simulation platform provides a realistic vehicle model, powertrain model, sensor model, traffic model, and road-network model to enable the evaluation of the energy efficiency of eco-autonomous driving.