 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiCruise: Eco-Lane Selection Strategy with Eco-Cruise Control for Connected and Automated Vehicles
Paper and Code
Apr 24, 2021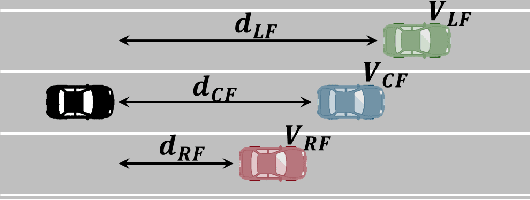
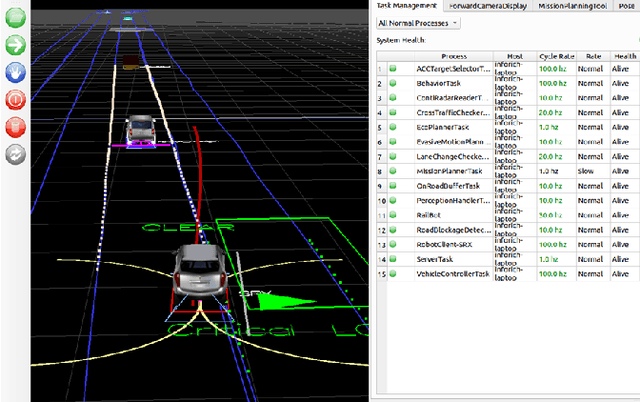
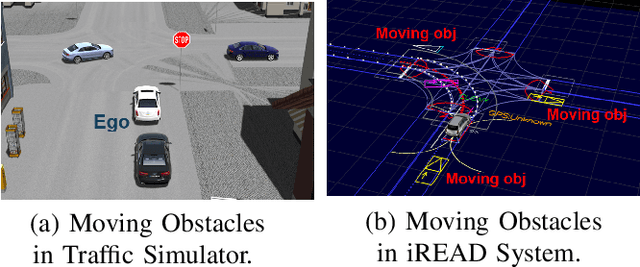
Connected and Automated Vehicles (CAVs) have real-time information from the surrounding environment by using local on-board sensors, V2X (Vehicle-to-Everything) communications, pre-loaded vehicle-specific lookup tables, and map database. CAVs are capable of improving energy efficiency by incorporating these information. In particular, Eco-Cruise and Eco-Lane Selection on highways and/or motorways have immense potential to save energy, because there are generally fewer traffic controllers and the vehicles keep moving in general. In this paper, we present a cooperative and energy-efficient lane-selection strategy named MultiCruise, where each CAV selects one among multiple candidate lanes that allows the most energy-efficient travel. MultiCruise incorporates an Eco-Cruise component to select the most energy-efficient lane. The Eco-Cruise component calculates the driving parameters and prospective energy consumption of the ego vehicle for each candidate lane, and the Eco-Lane Selection component uses these values. As a result, MultiCruise can account for multiple data sources, such as the road curvature and the surrounding vehicles' velocities and accelerations. The eco-autonomous driving strategy, MultiCruise, is tested, designed and verified by using a co-simulation test platform that includes autonomous driving software and realistic road networks to study the performance under realistic driving conditions. Our experimental evaluations show that our eco-autonomous MultiCruise saves up to 8.5% fuel consumption.