 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Multi-Target Tracking in Dynamic Environments: Distributed Control Methods Within the Random Finite Set Framework
Jan 25, 2024



Tracking multiple targets in dynamic environments using distributed sensor networks is a challenging problem that has received significant attention in recent years. In such scenarios, the network of sensors must coordinate their actions to estimate the locations and trajectories of multiple targets accurately. Multi-sensor control methods can improve the performance of these networks by enabling efficient utilization of resources and enhancing the accuracy of the estimated target states. This paper proposes two novel multi-sensor control methods that utilize the Random Finite Set (RFS) framework to address this problem. Our methods improve computational tractability and enable fully distributed control, making them suitable for real-time applications.
Distributed Complementary Fusion for Connected Vehicles
Sep 09, 2022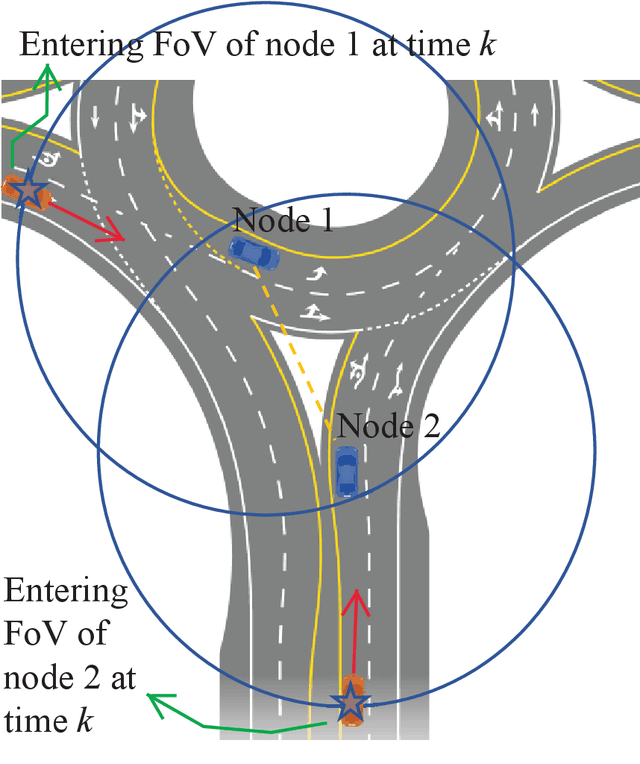
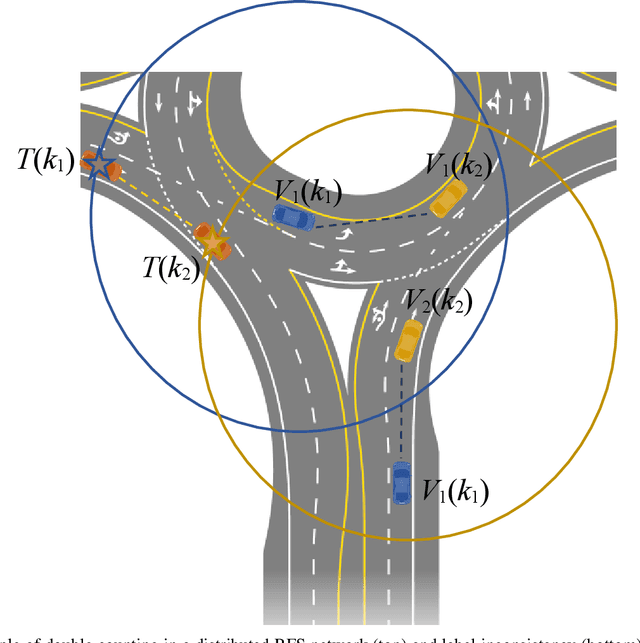
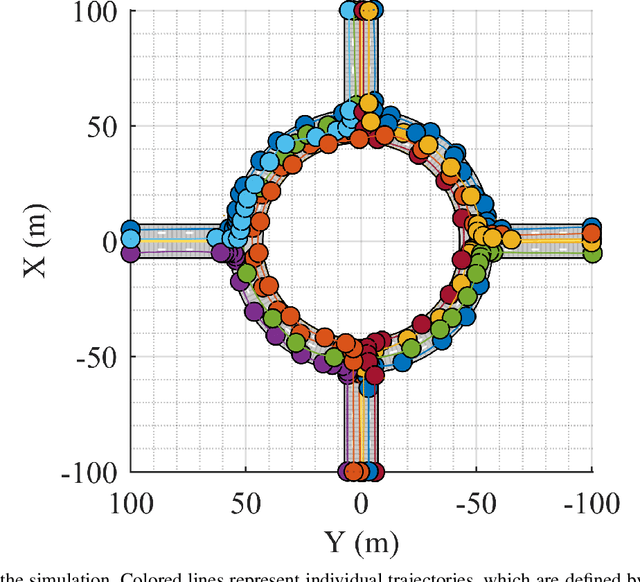
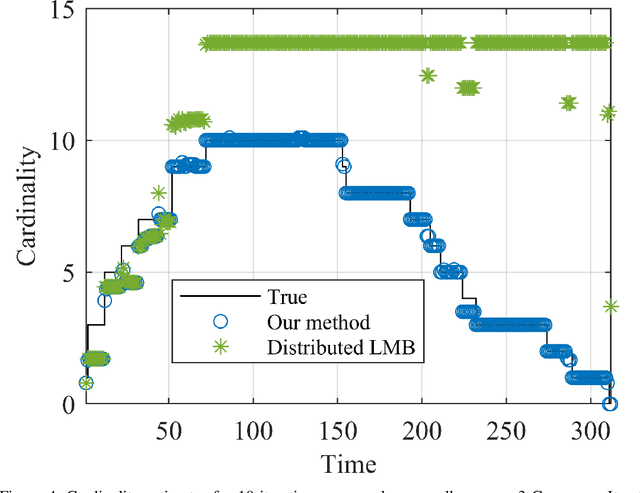
We present a random finite set-based method for achieving comprehensive situation awareness by each vehicle in a distributed vehicle network. Our solution is designed for labeled multi-Bernoulli filters running in each vehicle. It involves complementary fusion of sensor information locally running through consensus iterations. We introduce a novel label merging algorithm to eliminate double counting. We also extend the label space to incorporate sensor identities. This helps to overcome label inconsistencies. We show that the proposed algorithm is able to outperform the standard LMB filter using a distributed complementary approach with limited fields of view.
Interaction-Aware Labeled Multi-Bernoulli Filter
Apr 19, 2022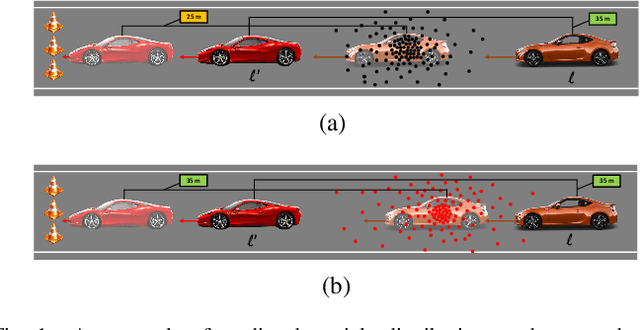
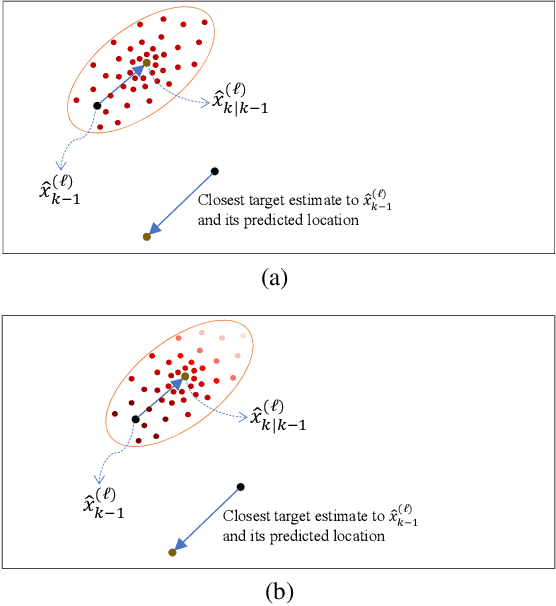
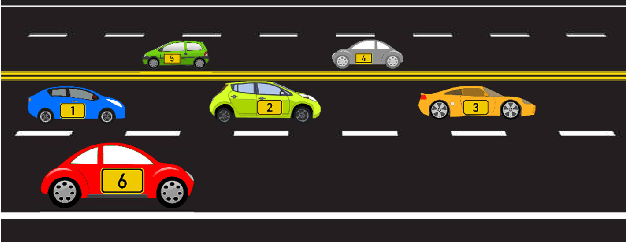
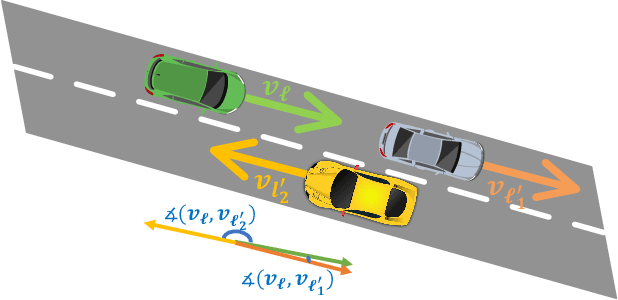
Tracking multiple objects through time is an important part of an intelligent transportation system. Random finite set (RFS)-based filters are one of the emerging techniques for tracking multiple objects. In multi-object tracking (MOT), a common assumption is that each object is moving independent of its surroundings. But in many real-world applications, target objects interact with one another and the environment. Such interactions, when considered for tracking, are usually modeled by an interactive motion model which is application specific. In this paper, we present a novel approach to incorporate target interactions within the prediction step of an RFS-based multi-target filter, i.e. labeled multi-Bernoulli (LMB) filter. The method has been developed for two practical applications of tracking a coordinated swarm and vehicles. The method has been tested for a complex vehicle tracking dataset and compared with the LMB filter through the OSPA and OSPA$^{(2)}$ metrics. The results demonstrate that the proposed interaction-aware method depicts considerable performance enhancement over the LMB filter in terms of the selected metrics.
Anomaly Detection of Defect using Energy of Point Pattern Features within Random Finite Set Framework
Aug 27, 2021
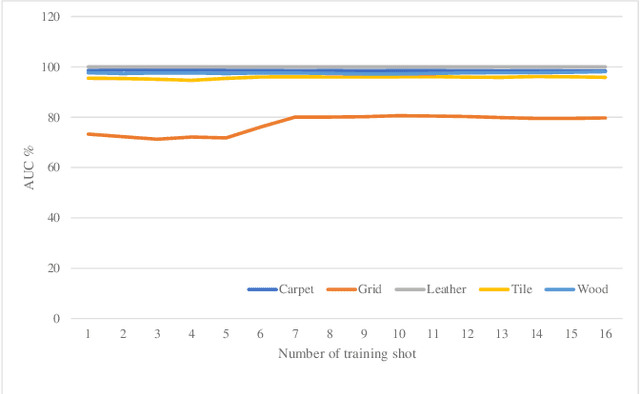
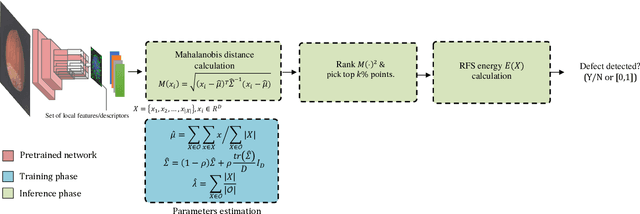
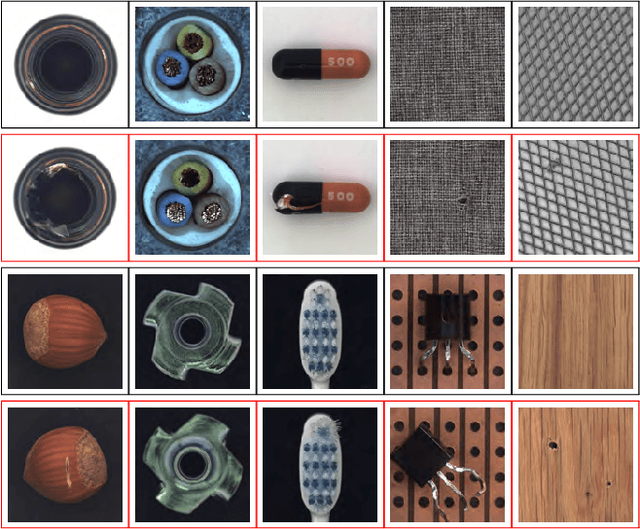
In this paper, we propose an efficient approach for industrial defect detection that is modeled based on anomaly detection using point pattern data. Most recent works use \textit{global features} for feature extraction to summarize image content. However, global features are not robust against lighting and viewpoint changes and do not describe the image's geometrical information to be fully utilized in the manufacturing industry. To the best of our knowledge, we are the first to propose using transfer learning of local/point pattern features to overcome these limitations and capture geometrical information of the image regions. We model these local/point pattern features as a random finite set (RFS). In addition we propose RFS energy, in contrast to RFS likelihood as anomaly score. The similarity distribution of point pattern features of the normal sample has been modeled as a multivariate Gaussian. Parameters learning of the proposed RFS energy does not require any heavy computation. We evaluate the proposed approach on the MVTec AD dataset, a multi-object defect detection dataset. Experimental results show the outstanding performance of our proposed approach compared to the state-of-the-art methods, and the proposed RFS energy outperforms the state-of-the-art in the few shot learning settings.
Evaluation of Point Pattern Features for Anomaly Detection of Defect within Random Finite Set Framework
Feb 03, 2021

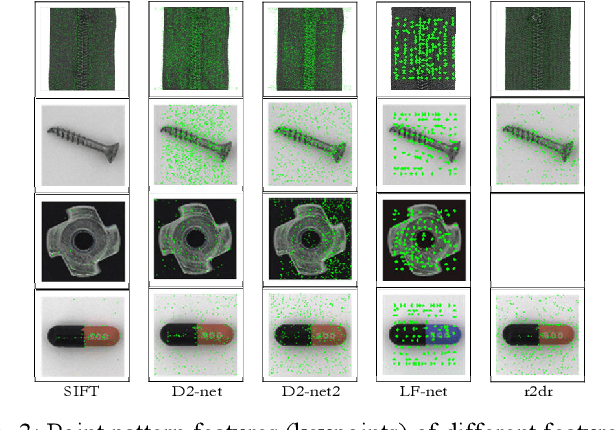
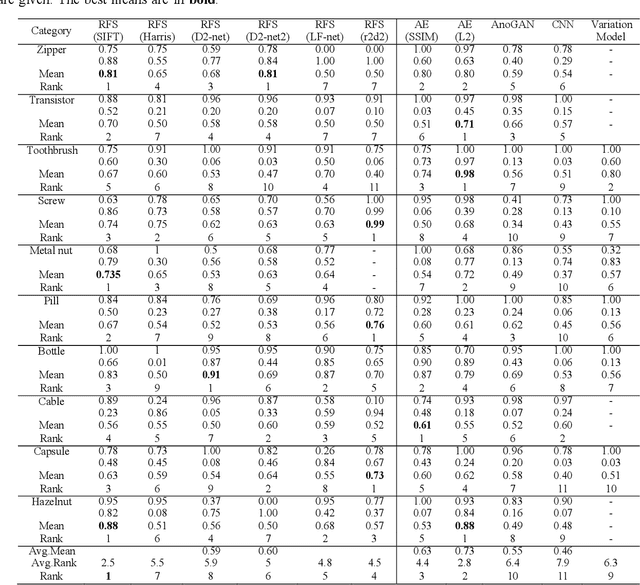
Defect detection in the manufacturing industry is of utmost importance for product quality inspection. Recently, optical defect detection has been investigated as an anomaly detection using different deep learning methods. However, the recent works do not explore the use of point pattern features, such as SIFT for anomaly detection using the recently developed set-based methods. In this paper, we present an evaluation of different point pattern feature detectors and descriptors for defect detection application. The evaluation is performed within the random finite set framework. Handcrafted point pattern features, such as SIFT as well as deep features are used in this evaluation. Random finite set-based defect detection is compared with state-of-the-arts anomaly detection methods. The results show that using point pattern features, such as SIFT as data points for random finite set-based anomaly detection achieves the most consistent defect detection accuracy on the MVTec-AD dataset.