Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Complementary Fusion for Connected Vehicles
Paper and Code
Sep 09, 2022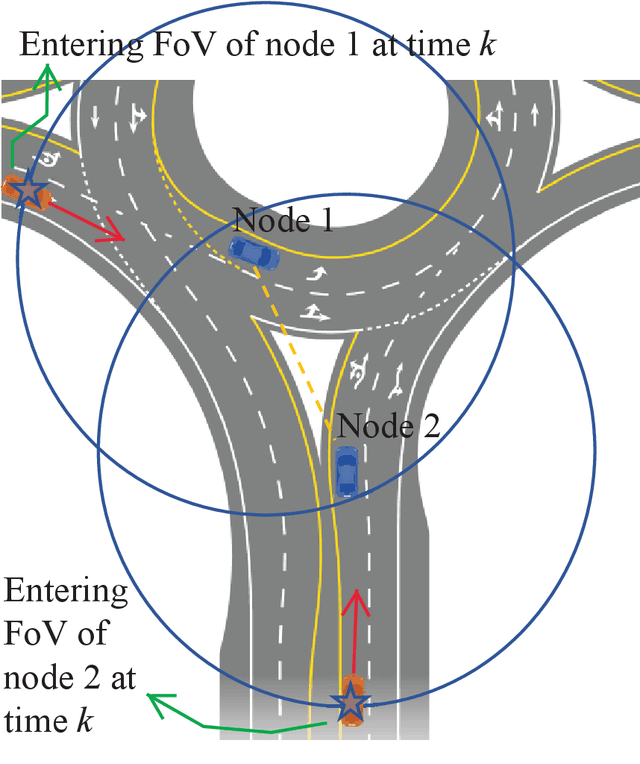
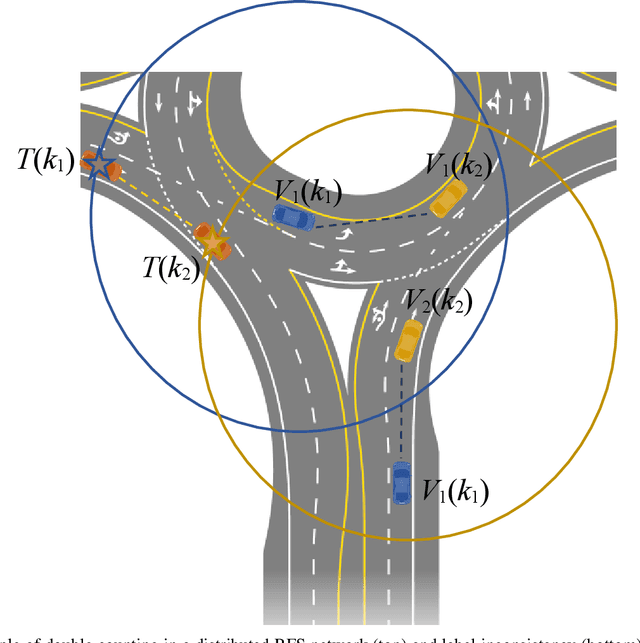
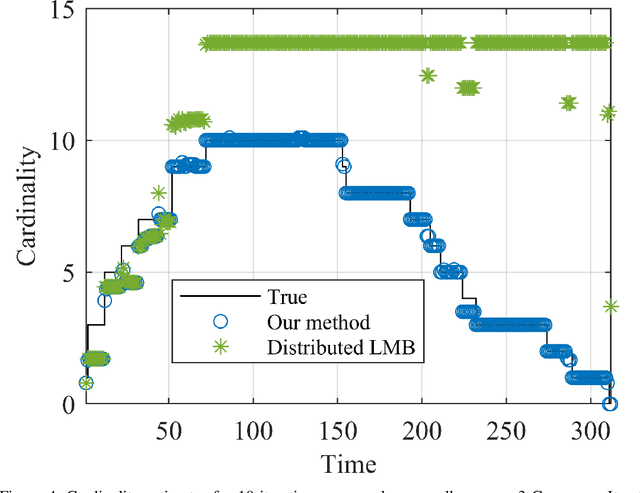
We present a random finite set-based method for achieving comprehensive situation awareness by each vehicle in a distributed vehicle network. Our solution is designed for labeled multi-Bernoulli filters running in each vehicle. It involves complementary fusion of sensor information locally running through consensus iterations. We introduce a novel label merging algorithm to eliminate double counting. We also extend the label space to incorporate sensor identities. This helps to overcome label inconsistencies. We show that the proposed algorithm is able to outperform the standard LMB filter using a distributed complementary approach with limited fields of view.
* 2022 11th International Conference on Computer Applications &
Information Security (ICCAIS)
View paper on