 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapturing complex hand movements and object interactions using machine learning-powered stretchable smart textile gloves
Oct 03, 2024Accurate real-time tracking of dexterous hand movements and interactions has numerous applications in human-computer interaction, metaverse, robotics, and tele-health. Capturing realistic hand movements is challenging because of the large number of articulations and degrees of freedom. Here, we report accurate and dynamic tracking of articulated hand and finger movements using stretchable, washable smart gloves with embedded helical sensor yarns and inertial measurement units. The sensor yarns have a high dynamic range, responding to low 0.005 % to high 155 % strains, and show stability during extensive use and washing cycles. We use multi-stage machine learning to report average joint angle estimation root mean square errors of 1.21 and 1.45 degrees for intra- and inter-subjects cross-validation, respectively, matching accuracy of costly motion capture cameras without occlusion or field of view limitations. We report a data augmentation technique that enhances robustness to noise and variations of sensors. We demonstrate accurate tracking of dexterous hand movements during object interactions, opening new avenues of applications including accurate typing on a mock paper keyboard, recognition of complex dynamic and static gestures adapted from American Sign Language and object identification.
GaitMotion: A Multitask Dataset for Pathological Gait Forecasting
May 09, 2024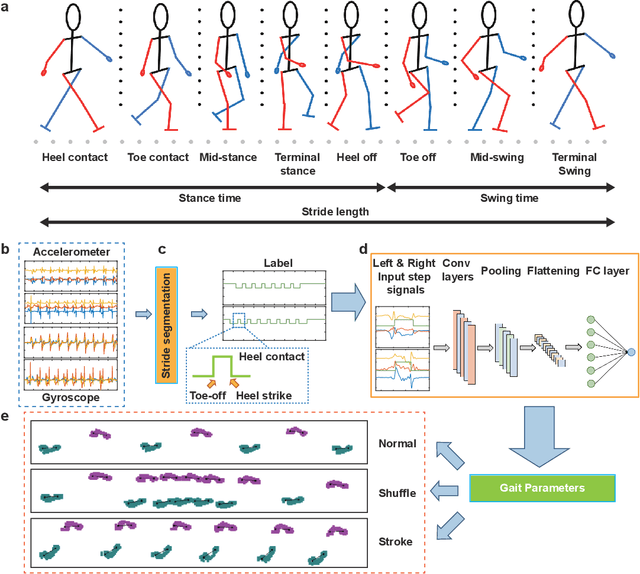

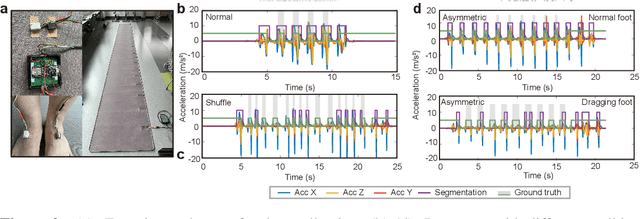

Gait benchmark empowers uncounted encouraging research fields such as gait recognition, humanoid locomotion, etc. Despite the growing focus on gait analysis, the research community is hindered by the limitations of the currently available databases, which mostly consist of videos or images with limited labeling. In this paper, we introduce GaitMotion, a multitask dataset leveraging wearable sensors to capture the patients' real-time movement with pathological gait. This dataset offers extensive ground-truth labeling for multiple tasks, including step/stride segmentation and step/stride length prediction, empowers researchers with a more holistic understanding of gait disturbances linked to neurological impairments. The wearable gait analysis suit captures the gait cycle, pattern, and parameters for both normal and pathological subjects. This data may prove beneficial for healthcare products focused on patient progress monitoring and post-disease recovery, as well as for forensics technologies aimed at person reidentification, and biomechanics research to aid in the development of humanoid robotics. Moreover, the analysis has considered the drift in data distribution across individual subjects. This drift can be attributed to each participant's unique behavioral habits or potential displacement of the sensor. Stride length variance for normal, Parkinson's, and stroke patients are compared to recognize the pathological walking pattern. As the baseline and benchmark, we provide an error of 14.1, 13.3, and 12.2 centimeters of stride length prediction for normal, Parkinson's, and Stroke gaits separately. We also analyzed the gait characteristics for normal and pathological gaits in terms of the gait cycle and gait parameters.