 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLogistic-Normal Likelihoods for Heteroscedastic Label Noise in Classification
Apr 06, 2023


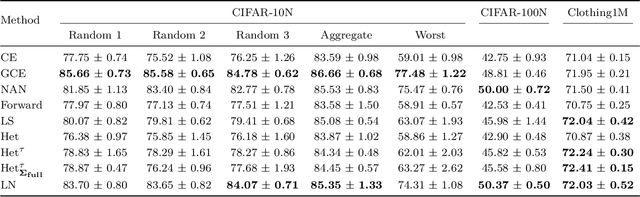
A natural way of estimating heteroscedastic label noise in regression is to model the observed (potentially noisy) target as a sample from a normal distribution, whose parameters can be learned by minimizing the negative log-likelihood. This loss has desirable loss attenuation properties, as it can reduce the contribution of high-error examples. Intuitively, this behavior can improve robustness against label noise by reducing overfitting. We propose an extension of this simple and probabilistic approach to classification that has the same desirable loss attenuation properties. We evaluate the effectiveness of the method by measuring its robustness against label noise in classification. We perform enlightening experiments exploring the inner workings of the method, including sensitivity to hyperparameters, ablation studies, and more.
LightDepth: A Resource Efficient Depth Estimation Approach for Dealing with Ground Truth Sparsity via Curriculum Learning
Nov 19, 2022



Advances in neural networks enable tackling complex computer vision tasks such as depth estimation of outdoor scenes at unprecedented accuracy. Promising research has been done on depth estimation. However, current efforts are computationally resource-intensive and do not consider the resource constraints of autonomous devices, such as robots and drones. In this work, we present a fast and battery-efficient approach for depth estimation. Our approach devises model-agnostic curriculum-based learning for depth estimation. Our experiments show that the accuracy of our model performs on par with the state-of-the-art models, while its response time outperforms other models by 71%. All codes are available online at https://github.com/fatemehkarimii/LightDepth.