 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Latent State Inference for Autonomous On-ramp Merging under Observation Delay
Mar 19, 2024



This paper presents a novel approach to address the challenging problem of autonomous on-ramp merging, where a self-driving vehicle needs to seamlessly integrate into a flow of vehicles on a multi-lane highway. We introduce the Lane-keeping, Lane-changing with Latent-state Inference and Safety Controller (L3IS) agent, designed to perform the on-ramp merging task safely without comprehensive knowledge about surrounding vehicles' intents or driving styles. We also present an augmentation of this agent called AL3IS that accounts for observation delays, allowing the agent to make more robust decisions in real-world environments with vehicle-to-vehicle (V2V) communication delays. By modeling the unobservable aspects of the environment through latent states, such as other drivers' intents, our approach enhances the agent's ability to adapt to dynamic traffic conditions, optimize merging maneuvers, and ensure safe interactions with other vehicles. We demonstrate the effectiveness of our method through extensive simulations generated from real traffic data and compare its performance with existing approaches. L3IS shows a 99.90% success rate in a challenging on-ramp merging case generated from the real US Highway 101 data. We further perform a sensitivity analysis on AL3IS to evaluate its robustness against varying observation delays, which demonstrates an acceptable performance of 93.84% success rate in 1-second V2V communication delay.
A Survey on Reinforcement Learning in Aviation Applications
Nov 03, 2022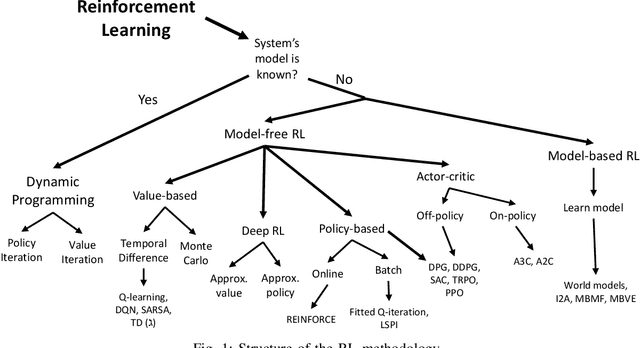
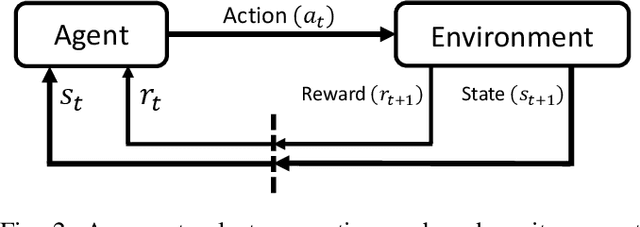
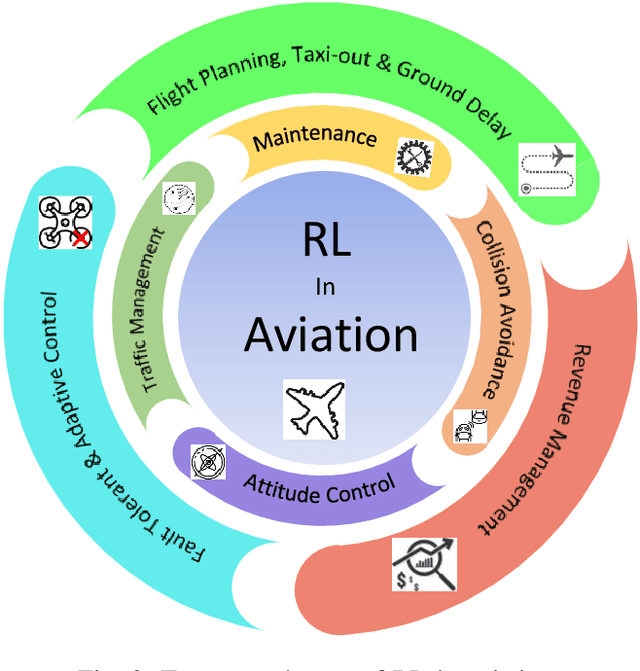
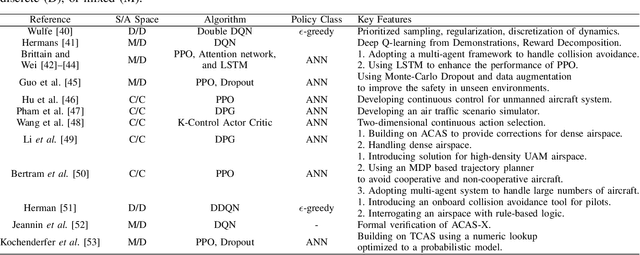
Compared with model-based control and optimization methods, reinforcement learning (RL) provides a data-driven, learning-based framework to formulate and solve sequential decision-making problems. The RL framework has become promising due to largely improved data availability and computing power in the aviation industry. Many aviation-based applications can be formulated or treated as sequential decision-making problems. Some of them are offline planning problems, while others need to be solved online and are safety-critical. In this survey paper, we first describe standard RL formulations and solutions. Then we survey the landscape of existing RL-based applications in aviation. Finally, we summarize the paper, identify the technical gaps, and suggest future directions of RL research in aviation.