 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScan2Plan: Efficient Floorplan Generation from 3D Scans of Indoor Scenes
Mar 16, 2020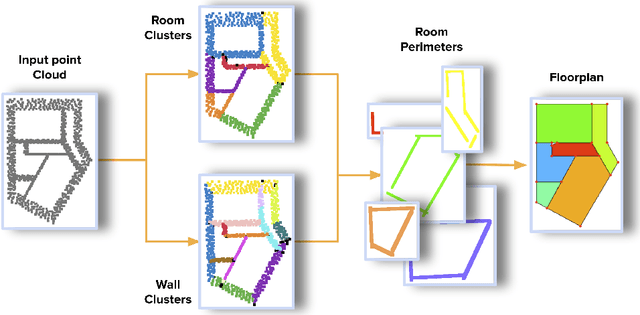
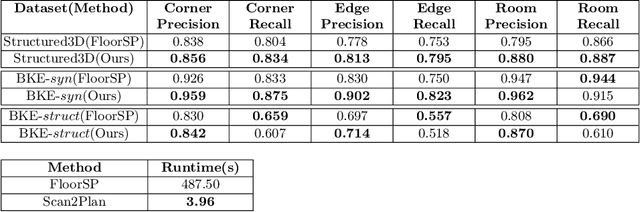
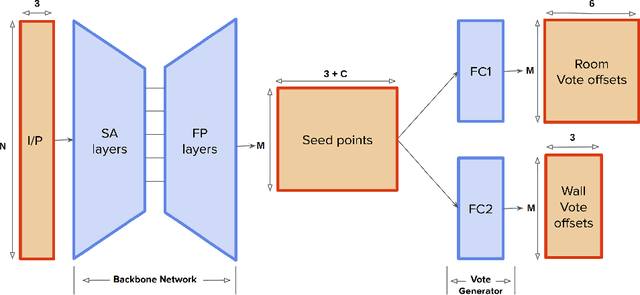
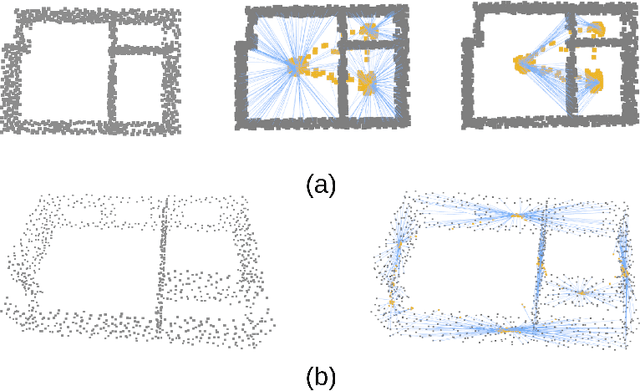
We introduce Scan2Plan, a novel approach for accurate estimation of a floorplan from a 3D scan of the structural elements of indoor environments. The proposed method incorporates a two-stage approach where the initial stage clusters an unordered point cloud representation of the scene into room instances and wall instances using a deep neural network based voting approach. The subsequent stage estimates a closed perimeter, parameterized by a simple polygon, for each individual room by finding the shortest path along the predicted room and wall keypoints. The final floorplan is simply an assembly of all such room perimeters in the global co-ordinate system. The Scan2Plan pipeline produces accurate floorplans for complex layouts, is highly parallelizable and extremely efficient compared to existing methods. The voting module is trained only on synthetic data and evaluated on publicly available Structured3D and BKE datasets to demonstrate excellent qualitative and quantitative results outperforming state-of-the-art techniques.
DeepPerimeter: Indoor Boundary Estimation from Posed Monocular Sequences
Apr 25, 2019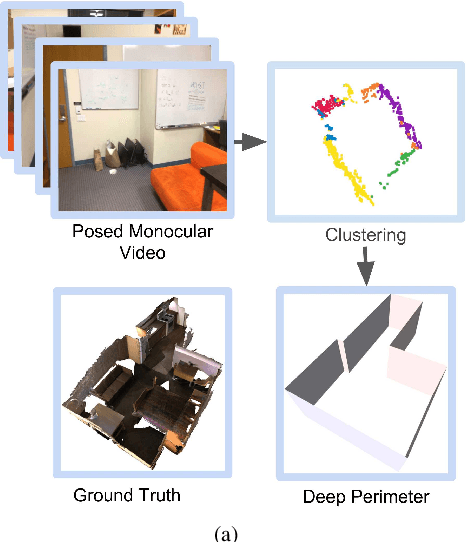
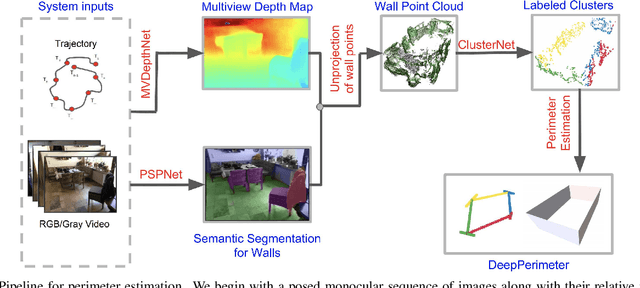
We present DeepPerimeter, a deep learning based pipeline for inferring a full indoor perimeter (i.e. exterior boundary map) from a sequence of posed RGB images. Our method relies on robust deep methods for depth estimation and wall segmentation to generate an exterior boundary point cloud, and then uses deep unsupervised clustering to fit wall planes to obtain a final boundary map of the room. We demonstrate that DeepPerimeter results in excellent visual and quantitative performance on the popular ScanNet and FloorNet datasets and works for room shapes of various complexities as well as in multiroom scenarios. We also establish important baselines for future work on indoor perimeter estimation, topics which will become increasingly prevalent as application areas like augmented reality and robotics become more significant.