 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonotonicity as an Architectural Bias for Robust Language Models
Feb 02, 2026Large language models (LLMs) are known to exhibit brittle behavior under adversarial prompts and jailbreak attacks, even after extensive alignment and fine-tuning. This fragility reflects a broader challenge of modern neural language models: small, carefully structured perturbations in high-dimensional input spaces can induce large and unpredictable changes in internal semantic representations and output. We investigate monotonicity as an architectural inductive bias for improving the robustness of Transformer-based language models. Monotonicity constrains semantic transformations so that strengthening information, evidence, or constraints cannot lead to regressions in the corresponding internal representations. Such order-preserving behavior has long been exploited in control and safety-critical systems to simplify reasoning and improve robustness, but has traditionally been viewed as incompatible with the expressivity required by neural language models. We show that this trade-off is not inherent. By enforcing monotonicity selectively in the feed-forward sublayers of sequence-to-sequence Transformers -- while leaving attention mechanisms unconstrained -- we obtain monotone language models that preserve the performance of their pretrained counterparts. This architectural separation allows negation, contradiction, and contextual interactions to be introduced explicitly through attention, while ensuring that subsequent semantic refinement is order-preserving. Empirically, monotonicity substantially improves robustness: adversarial attack success rates drop from approximately 69% to 19%, while standard summarization performance degrades only marginally.
Transfer Learning for Control Systems via Neural Simulation Relations
Dec 02, 2024



Transfer learning is an umbrella term for machine learning approaches that leverage knowledge gained from solving one problem (the source domain) to improve speed, efficiency, and data requirements in solving a different but related problem (the target domain). The performance of the transferred model in the target domain is typically measured via some notion of loss function in the target domain. This paper focuses on effectively transferring control logic from a source control system to a target control system while providing approximately similar behavioral guarantees in both domains. However, in the absence of a complete characterization of behavioral specifications, this problem cannot be captured in terms of loss functions. To overcome this challenge, we use (approximate) simulation relations to characterize observational equivalence between the behaviors of two systems. Simulation relations ensure that the outputs of both systems, equipped with their corresponding controllers, remain close to each other over time, and their closeness can be quantified {\it a priori}. By parameterizing simulation relations with neural networks, we introduce the notion of \emph{neural simulation relations}, which provides a data-driven approach to transfer any synthesized controller, regardless of the specification of interest, along with its proof of correctness. Compared with prior approaches, our method eliminates the need for a closed-loop mathematical model and specific requirements for both the source and target systems. We also introduce validity conditions that, when satisfied, guarantee the closeness of the outputs of two systems equipped with their corresponding controllers, thus eliminating the need for post-facto verification. We demonstrate the effectiveness of our approach through case studies involving a vehicle and a double inverted pendulum.
Transfer of Safety Controllers Through Learning Deep Inverse Dynamics Model
May 22, 2024



Control barrier certificates have proven effective in formally guaranteeing the safety of the control systems. However, designing a control barrier certificate is a time-consuming and computationally expensive endeavor that requires expert input in the form of domain knowledge and mathematical maturity. Additionally, when a system undergoes slight changes, the new controller and its correctness certificate need to be recomputed, incurring similar computational challenges as those faced during the design of the original controller. Prior approaches have utilized transfer learning to transfer safety guarantees in the form of a barrier certificate while maintaining the control invariant. Unfortunately, in practical settings, the source and the target environments often deviate substantially in their control inputs, rendering the aforementioned approach impractical. To address this challenge, we propose integrating \emph{inverse dynamics} -- a neural network that suggests required action given a desired successor state -- of the target system with the barrier certificate of the source system to provide formal proof of safety. In addition, we propose a validity condition that, when met, guarantees correctness of the controller. We demonstrate the effectiveness of our approach through three case studies.
Maximum Entropy Dueling Network Architecture
Jul 30, 2021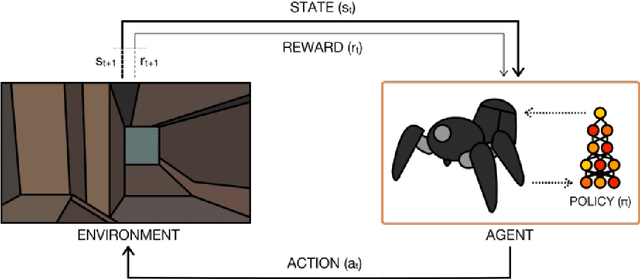
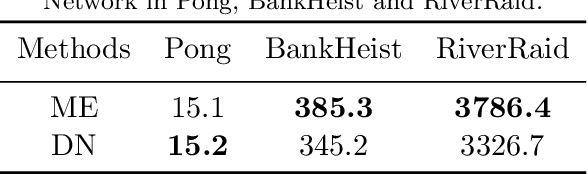
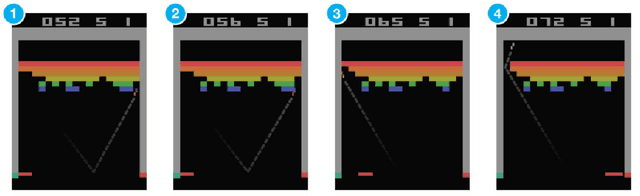
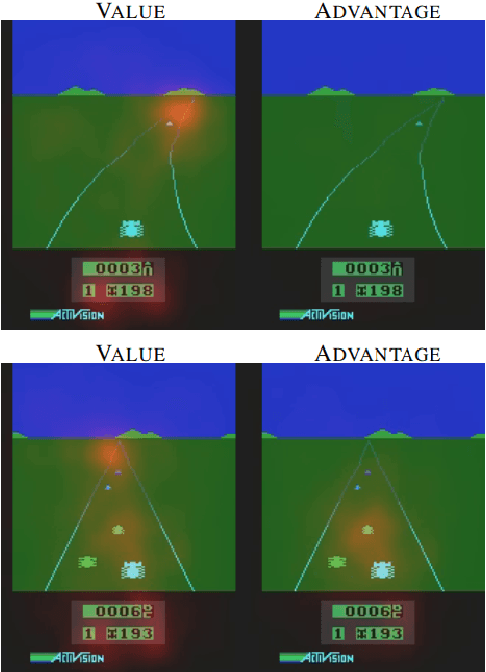
In recent years, there have been many deep structures for Reinforcement Learning, mainly for value function estimation and representations. These methods achieved great success in Atari 2600 domain. In this paper, we propose an improved architecture based upon Dueling Networks, in this architecture, there are two separate estimators, one approximate the state value function and the other, state advantage function. This improvement based on Maximum Entropy, shows better policy evaluation compared to the original network and other value-based architectures in Atari domain.
A Novel Method For Designing Transferable Soft Sensors And Its Application
Aug 05, 2020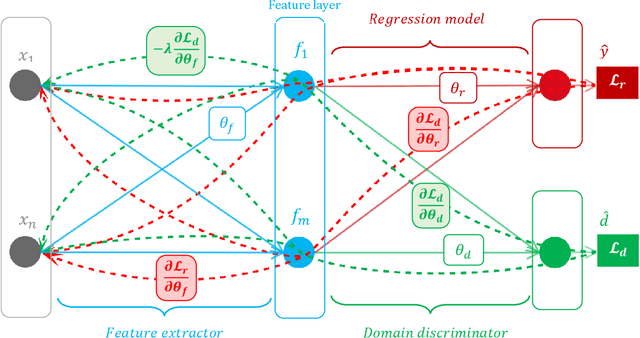
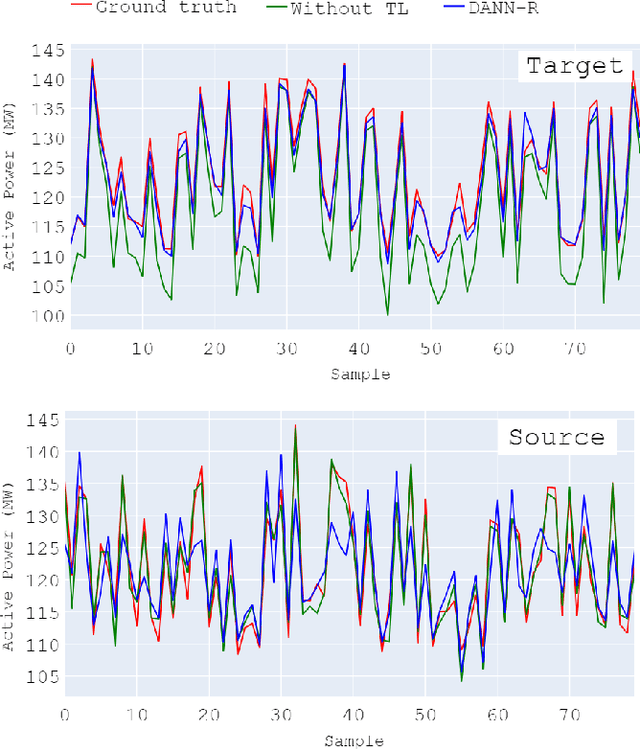
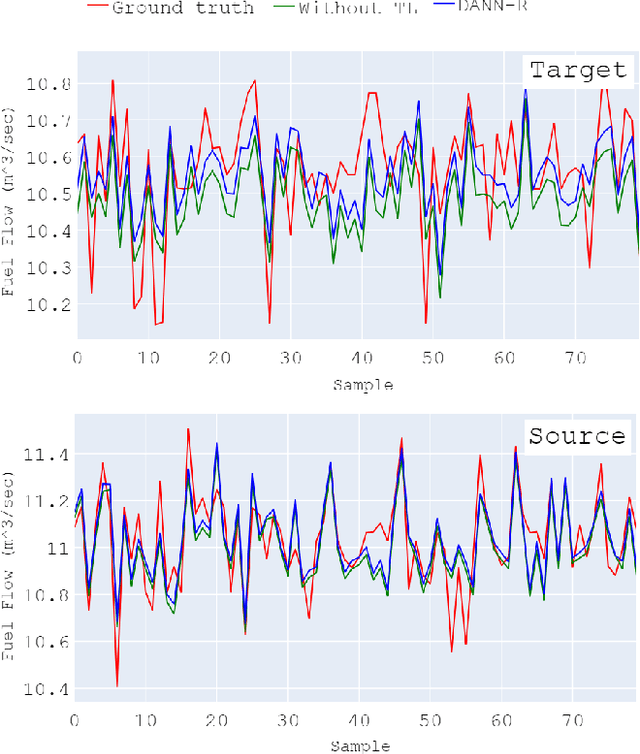
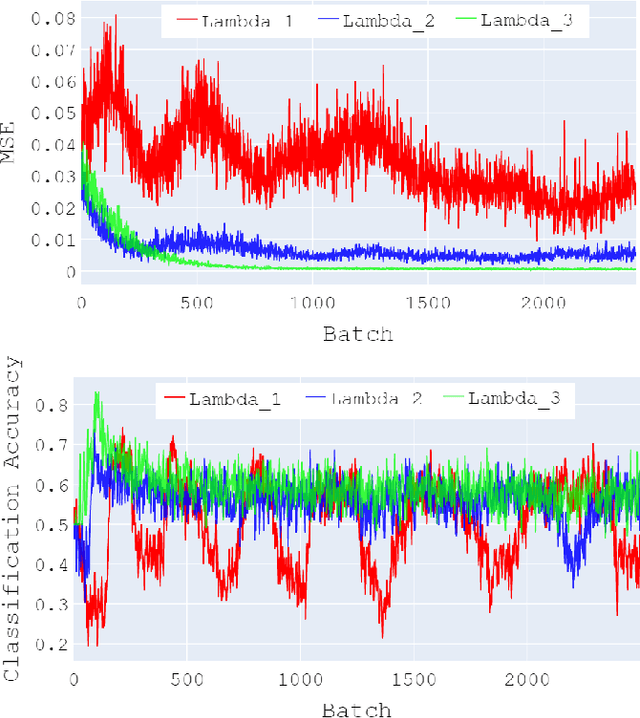
In this paper, a new approach is proposed for designing transferable soft sensors. Soft sensing is one of the significant applications of data-driven methods in the condition monitoring of plants. While hard sensors can be easily used in various plants, soft sensors are confined to the specific plant they are designed for and cannot be used in a new plant or even used in some new working conditions in the same plant. In this paper, a solution is proposed for this underlying obstacle in data-driven condition monitoring systems. Data-driven methods suffer from the fact that the distribution of the data by which the models are constructed may not be the same as the distribution of the data to which the model will be applied. This ultimately leads to the decline of models accuracy. We proposed a new transfer learning (TL) based regression method, called Domain Adversarial Neural Network Regression (DANN-R), and employed it for designing transferable soft sensors. We used data collected from the SCADA system of an industrial power plant to comprehensively investigate the functionality of the proposed method. The result reveals that the proposed transferable soft sensor can successfully adapt to new plants and new working conditions.