 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotics Evolution: from Remote Brain to Cloud
Jan 08, 2019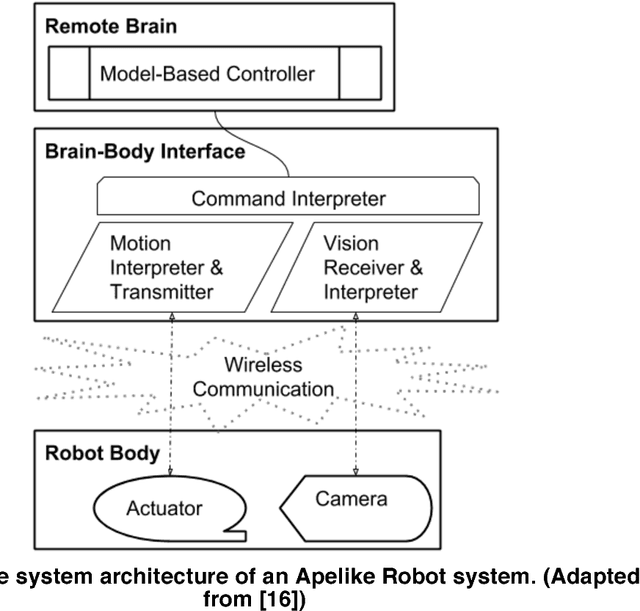
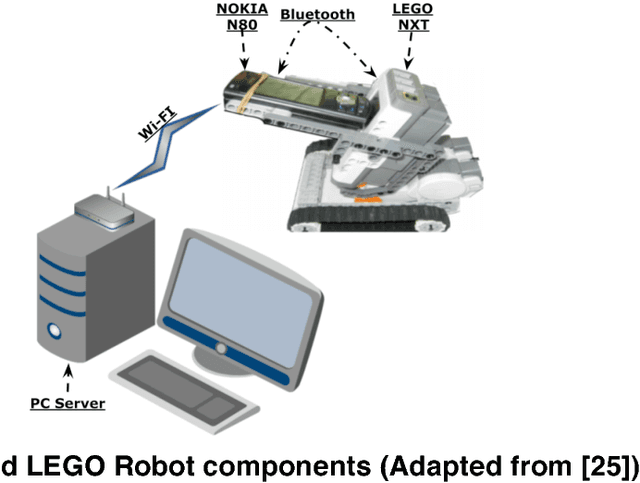
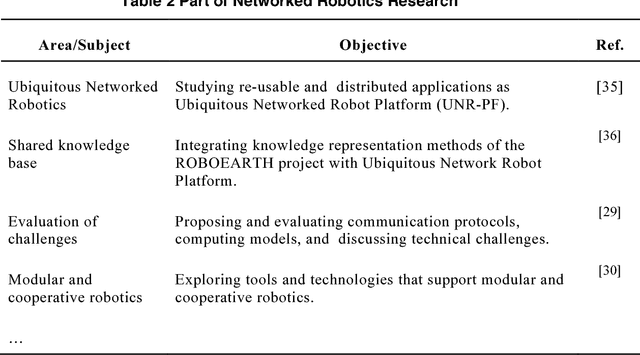
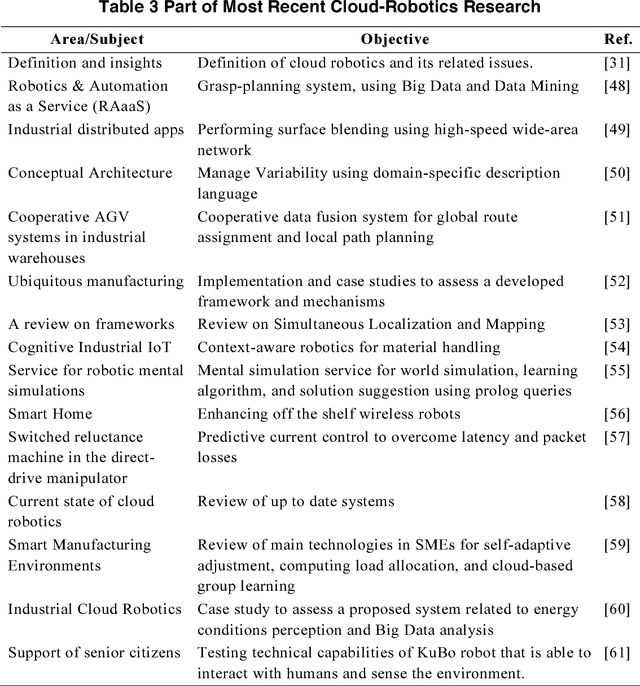
Robotic systems have been evolving since decades and touching almost all aspects of life, either for leisure or critical applications. Most of traditional robotic systems operate in well-defined environments utilizing pre-configured on-board processing units. However, modern and foreseen robotic applications ask for complex processing requirements that exceed the limits of on-board computing power. Cloud computing and the related technologies have high potential to overcome on-board hardware restrictions and can improve the performance efficiency. This research highlights the advancements in robotic systems with focus on cloud robotics as an emerging trend. There exists an extensive amount of effort to leverage the potentials of robotic systems and to handle arising shortcomings. Moreover, there are promising insights for future breed of intelligent, flexible, and autonomous robotic systems in the Internet of Things era.
Learning in the Model Space for Fault Diagnosis
Oct 31, 2012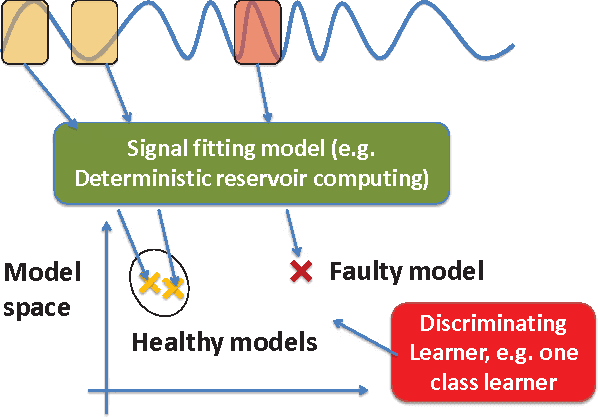
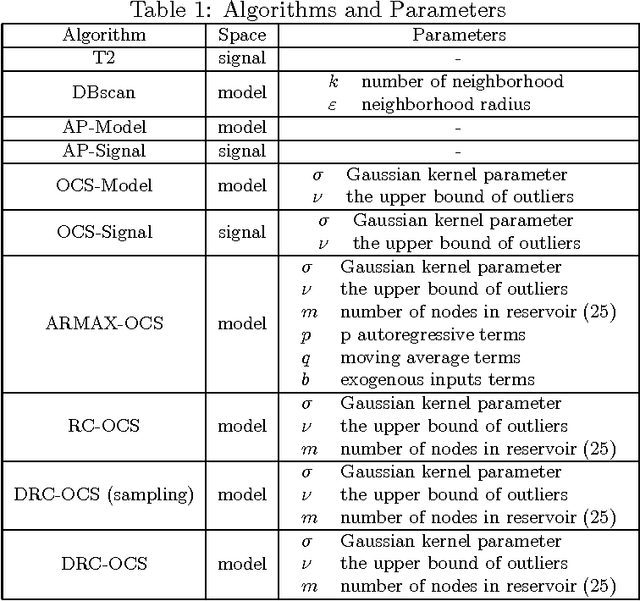
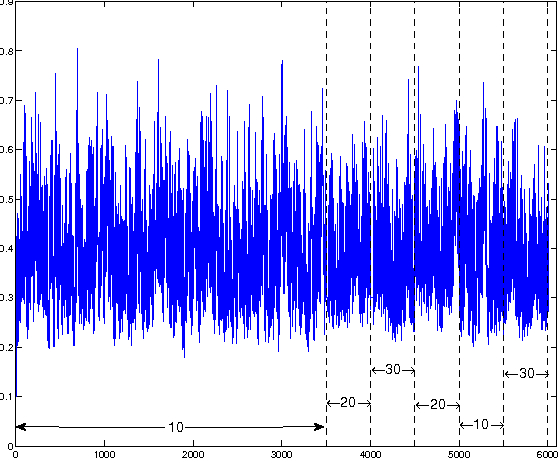
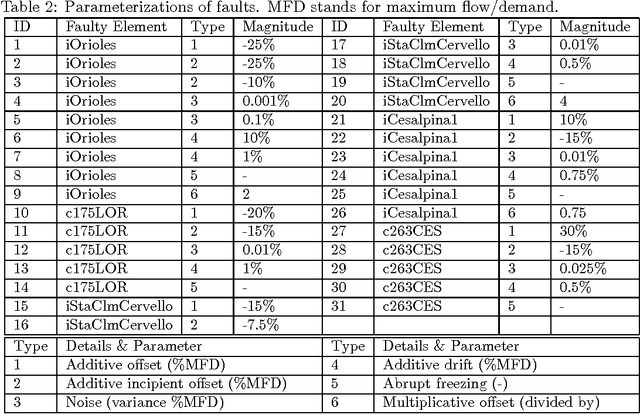
The emergence of large scaled sensor networks facilitates the collection of large amounts of real-time data to monitor and control complex engineering systems. However, in many cases the collected data may be incomplete or inconsistent, while the underlying environment may be time-varying or un-formulated. In this paper, we have developed an innovative cognitive fault diagnosis framework that tackles the above challenges. This framework investigates fault diagnosis in the model space instead of in the signal space. Learning in the model space is implemented by fitting a series of models using a series of signal segments selected with a rolling window. By investigating the learning techniques in the fitted model space, faulty models can be discriminated from healthy models using one-class learning algorithm. The framework enables us to construct fault library when unknown faults occur, which can be regarded as cognitive fault isolation. This paper also theoretically investigates how to measure the pairwise distance between two models in the model space and incorporates the model distance into the learning algorithm in the model space. The results on three benchmark applications and one simulated model for the Barcelona water distribution network have confirmed the effectiveness of the proposed framework.