 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Real-time Traffic Trajectory Tracking, Speed Estimation, and Driver Behavior Calibration at Urban Intersections Using Virtual Traffic Lanes
Jun 18, 2021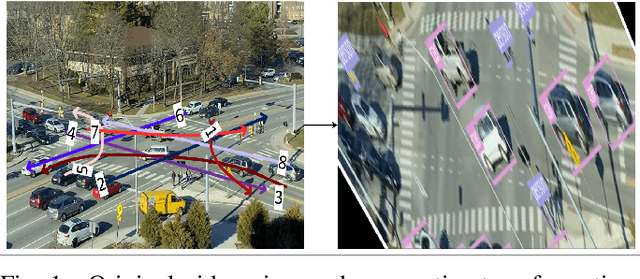
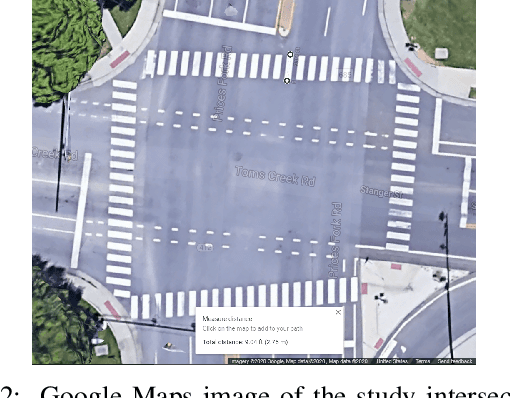
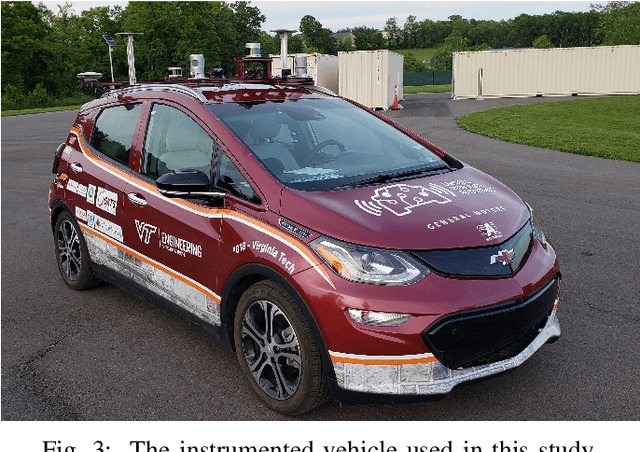
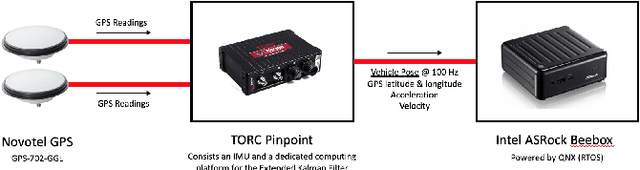
In a previous study, we presented VT-Lane, a three-step framework for real-time vehicle detection, tracking, and turn movement classification at urban intersections. In this study, we present a case study incorporating the highly accurate trajectories and movement classification obtained via VT-Lane for the purpose of speed estimation and driver behavior calibration for traffic at urban intersections. First, we use a highly instrumented vehicle to verify the estimated speeds obtained from video inference. The results of the speed validation show that our method can estimate the average travel speed of detected vehicles in real-time with an error of 0.19 m/sec, which is equivalent to 2% of the average observed travel speeds in the intersection of the study. Instantaneous speeds (at the resolution of 30 Hz) were found to be estimated with an average error of 0.21 m/sec and 0.86 m/sec respectively for free-flowing and congested traffic conditions. We then use the estimated speeds to calibrate the parameters of a driver behavior model for the vehicles in the area of study. The results show that the calibrated model replicates the driving behavior with an average error of 0.45 m/sec, indicating the high potential for using this framework for automated, large-scale calibration of car-following models from roadside traffic video data, which can lead to substantial improvements in traffic modeling via microscopic simulation.
Context-Aware System Synthesis, Task Assignment, and Routing
Aug 25, 2017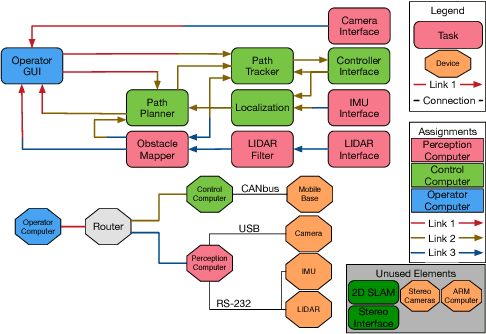
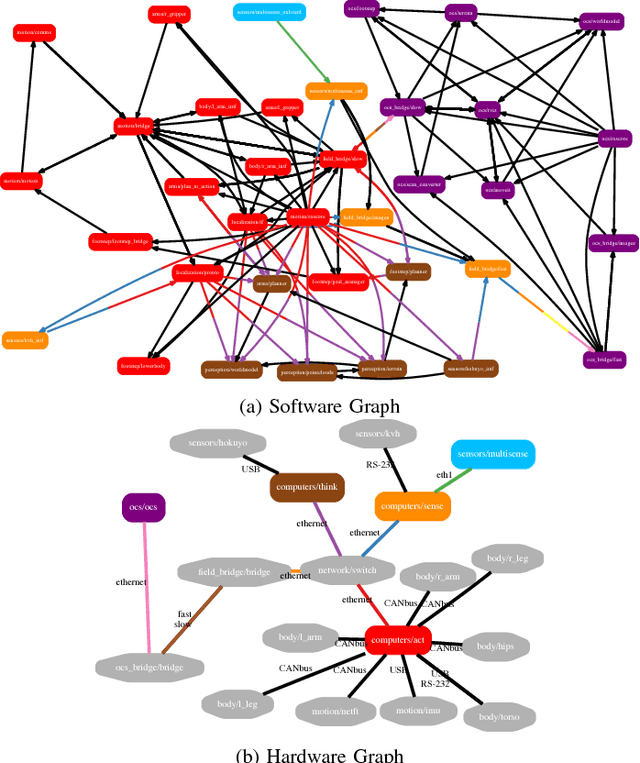
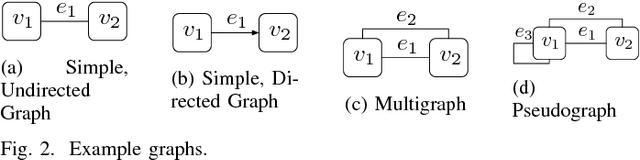
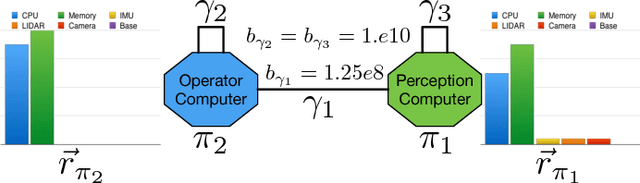
The design and organization of complex robotic systems traditionally requires laborious trial-and-error processes to ensure both hardware and software components are correctly connected with the resources necessary for computation. This paper presents a novel generalization of the quadratic assignment and routing problem, introducing formalisms for selecting components and interconnections to synthesize a complete system capable of providing some user-defined functionality. By introducing mission context, functional requirements, and modularity directly into the assignment problem, we derive a solution where components are automatically selected and then organized into an optimal hardware and software interconnection structure, all while respecting restrictions on component viability and required functionality. The ability to generate \emph{complete} functional systems directly from individual components reduces manual design effort by allowing for a guided exploration of the design space. Additionally, our formulation increases resiliency by quantifying resource margins and enabling adaptation of system structure in response to changing environments, hardware or software failure. The proposed formulation is cast as an integer linear program which is provably $\mathcal{NP}$-hard. Two case studies are developed and analyzed to highlight the expressiveness and complexity of problems that can be addressed by this approach: the first explores the iterative development of a ground-based search-and-rescue robot in a variety of mission contexts, while the second explores the large-scale, complex design of a humanoid disaster robot for the DARPA Robotics Challenge. Numerical simulations quantify real world performance and demonstrate tractable time complexity for the scale of problems encountered in many modern robotic systems.