 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHOUND: An Open-Source, Low-cost Research Platform for High-speed Off-road Underactuated Nonholonomic Driving
Nov 19, 2023



Off-road vehicles are susceptible to rollovers in terrains with large elevation features, such as steep hills, ditches, and berms. One way to protect them against rollovers is ruggedization through the use of industrial-grade parts and physical modifications. However, this solution can be prohibitively expensive for academic research labs. Our key insight is that a software-based rollover-prevention system (RPS) enables the use of commercial-off-the-shelf hardware parts that are cheaper than their industrial counterparts, thus reducing overall cost. In this paper, we present HOUND, a small-scale, inexpensive, off-road autonomy platform that can handle challenging outdoor terrains at high speeds through the integration of an RPS. HOUND is integrated with a complete stack for perception and control, geared towards aggressive offroad driving. We deploy HOUND in the real world, at high speeds, on four different terrains covering 50 km of driving and highlight its utility in preventing rollovers and traversing difficult terrain. Additionally, through integration with BeamNG, a state-of-the-art driving simulator, we demonstrate a significant reduction in rollovers without compromising turning ability across a series of simulated experiments. Supplementary material can be found on our website, where we will also release all design documents for the platform: https://sites.google.com/view/prl-hound .
DATT: Deep Adaptive Trajectory Tracking for Quadrotor Control
Oct 17, 2023



Precise arbitrary trajectory tracking for quadrotors is challenging due to unknown nonlinear dynamics, trajectory infeasibility, and actuation limits. To tackle these challenges, we present Deep Adaptive Trajectory Tracking (DATT), a learning-based approach that can precisely track arbitrary, potentially infeasible trajectories in the presence of large disturbances in the real world. DATT builds on a novel feedforward-feedback-adaptive control structure trained in simulation using reinforcement learning. When deployed on real hardware, DATT is augmented with a disturbance estimator using L1 adaptive control in closed-loop, without any fine-tuning. DATT significantly outperforms competitive adaptive nonlinear and model predictive controllers for both feasible smooth and infeasible trajectories in unsteady wind fields, including challenging scenarios where baselines completely fail. Moreover, DATT can efficiently run online with an inference time less than 3.2 ms, less than 1/4 of the adaptive nonlinear model predictive control baseline
Feedback Linearization for Quadrotors with a Learned Acceleration Error Model
May 28, 2021
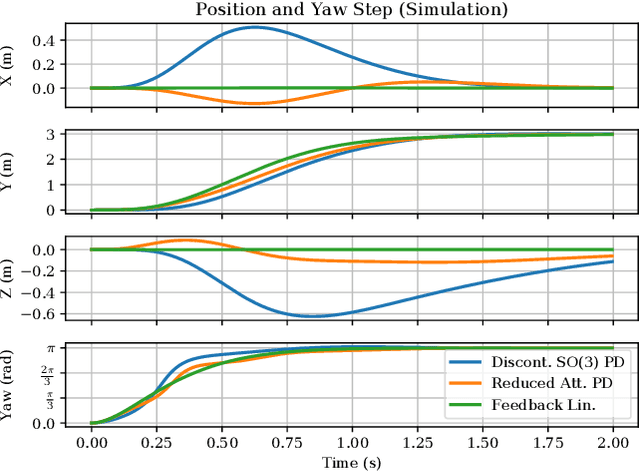
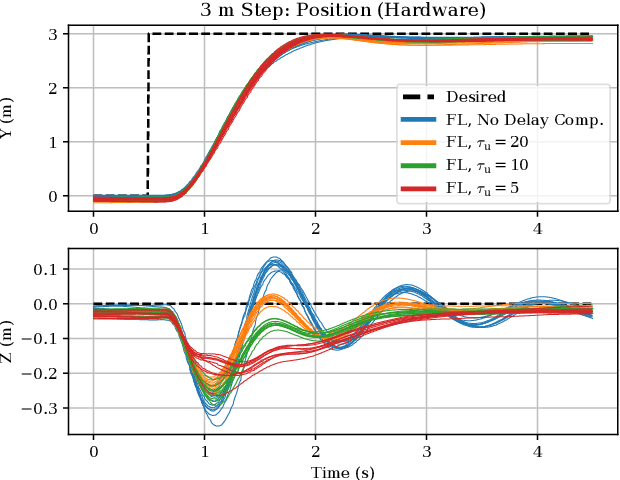

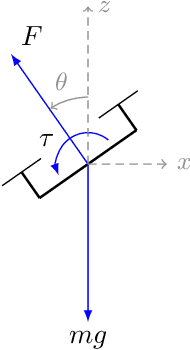
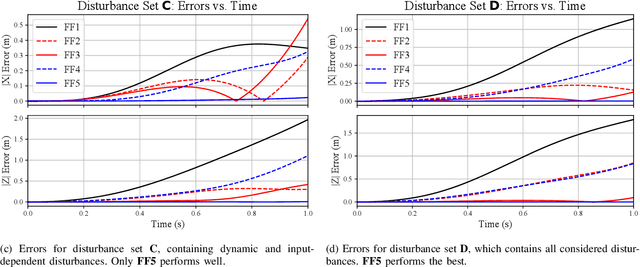
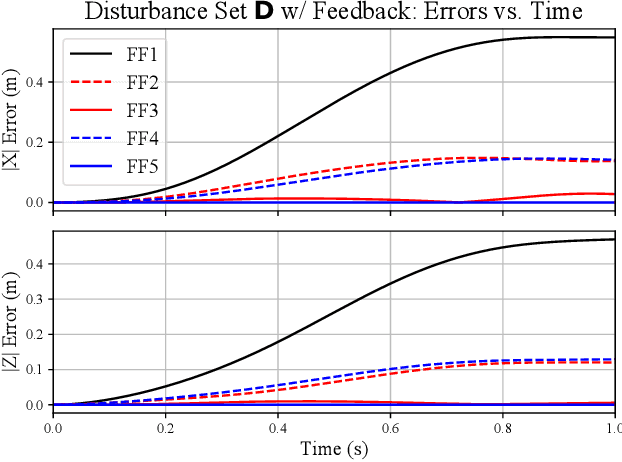
This paper enhances the feedback linearization controller for multirotors with a learned acceleration error model and a thrust input delay mitigation model. Feedback linearization controllers are theoretically appealing but their performance suffers on real systems, where the true system does not match the known system model. We take a step in reducing these robustness issues by learning an acceleration error model, applying this model in the position controller, and further propagating it forward to the attitude controller. We show how this approach improves performance over the standard feedback linearization controller in the presence of unmodeled dynamics and repeatable external disturbances in both simulation and hardware experiments. We also show that our thrust control input delay model improves the step response on hardware systems.
Rotational Error Metrics for Quadrotor Control
Nov 24, 2020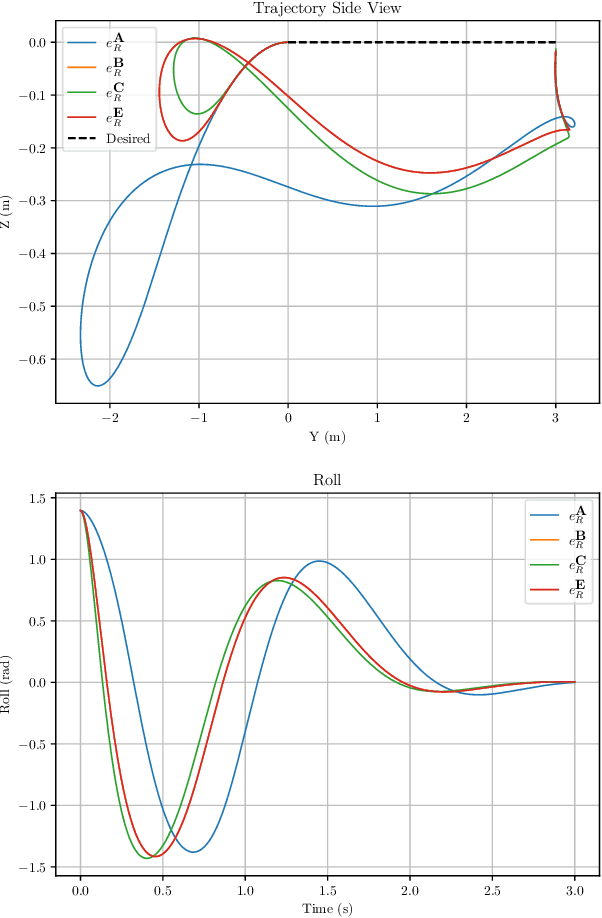
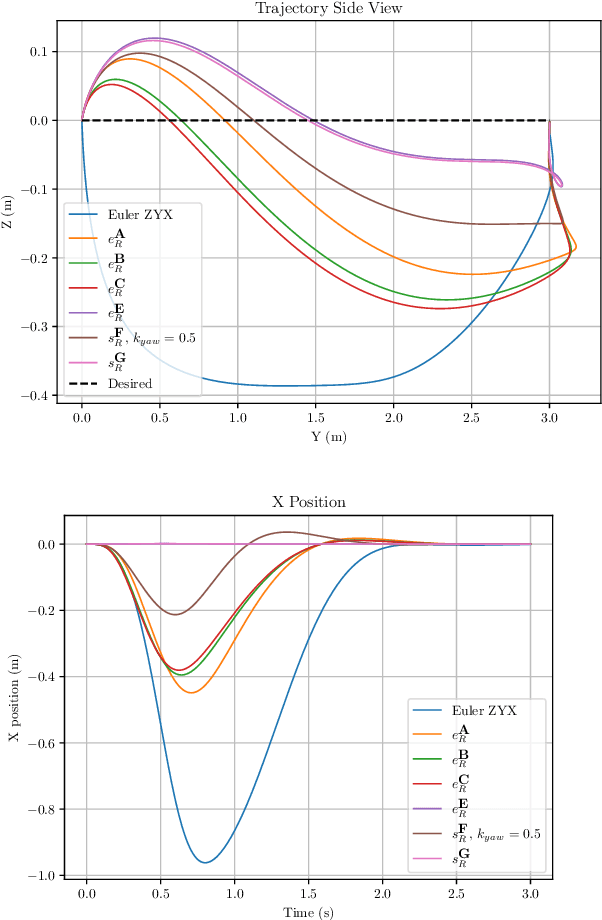
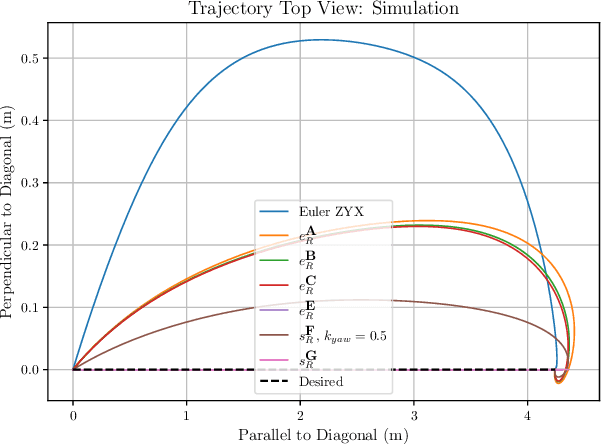
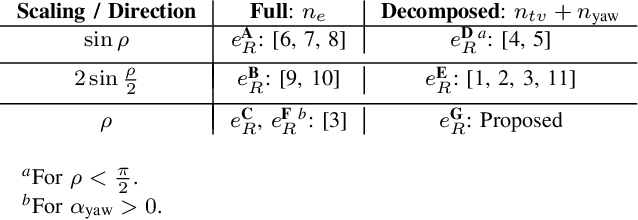
We analyze and experimentally compare various rotational error metrics for use in quadrotor controllers. Traditional quadrotor attitude controllers have used Euler angles or the full rotation to compute an attitude error and scale that to compute a control response. Recently, several works have shown that prioritizing quadrotor tilt, or thrust vector error, in the attitude controller leads to improved position control, especially in situations with large yaw error. We provide a catalog of proposed rotational metrics, place them into the same framework, and show that we can independently reason about and design the magnitude of the response and the direction of the response. Existing approaches mainly fall into two categories: (1) metrics that induce a response in the shortest direction to correct the full rotation error and (2) metrics that combine a response in the shortest direction to correct tilt error with the shortest direction to correct yaw error. We show experimental results to highlight the salient differences between the rotational error metrics. See https://alspitz.github.io/roterrormetrics.html for an interactive simulation visualizing the experiments performed.
Inverting Learned Dynamics Models for Aggressive Multirotor Control
May 31, 2019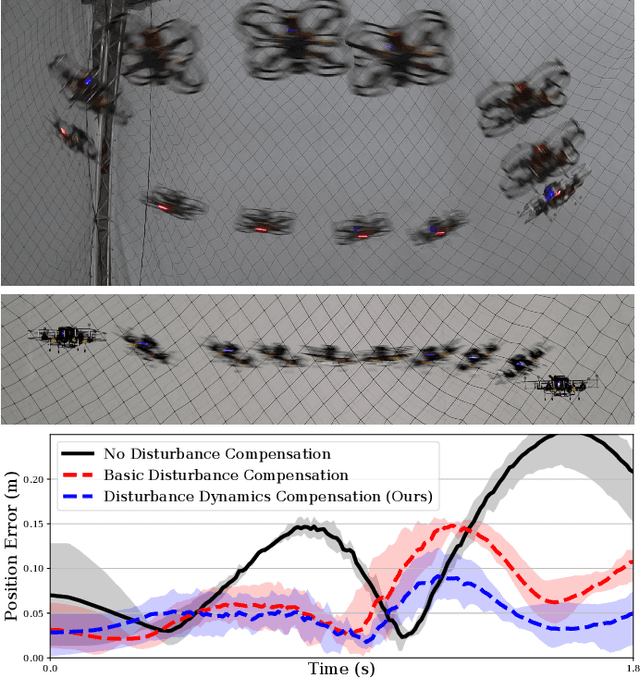
We present a control strategy that applies inverse dynamics to a learned acceleration error model for accurate multirotor control input generation. This allows us to retain accurate trajectory and control input generation despite the presence of exogenous disturbances and modeling errors. Although accurate control input generation is traditionally possible when combined with parameter learning-based techniques, we propose a method that can do so while solving the relatively easier non-parametric model learning problem. We show that our technique is able to compensate for a larger class of model disturbances than traditional techniques can and we show reduced tracking error while following trajectories demanding accelerations of more than 7 m/s^2 in multirotor simulation and hardware experiments.