 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring Versatile Behavior from Demonstrations by Matching Geometric Descriptors
Oct 17, 2022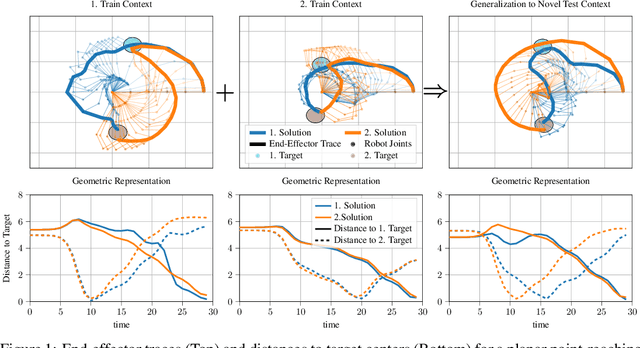
Humans intuitively solve tasks in versatile ways, varying their behavior in terms of trajectory-based planning and for individual steps. Thus, they can easily generalize and adapt to new and changing environments. Current Imitation Learning algorithms often only consider unimodal expert demonstrations and act in a state-action-based setting, making it difficult for them to imitate human behavior in case of versatile demonstrations. Instead, we combine a mixture of movement primitives with a distribution matching objective to learn versatile behaviors that match the expert's behavior and versatility. To facilitate generalization to novel task configurations, we do not directly match the agent's and expert's trajectory distributions but rather work with concise geometric descriptors which generalize well to unseen task configurations. We empirically validate our method on various robot tasks using versatile human demonstrations and compare to imitation learning algorithms in a state-action setting as well as a trajectory-based setting. We find that the geometric descriptors greatly help in generalizing to new task configurations and that combining them with our distribution-matching objective is crucial for representing and reproducing versatile behavior.