 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Orthopox Image Classification Using Hybrid Machine Learning and Deep Learning Models
Jun 06, 2025



Orthopoxvirus infections must be accurately classified from medical pictures for an easy and early diagnosis and epidemic prevention. The necessity for automated and scalable solutions is highlighted by the fact that traditional diagnostic techniques can be time-consuming and require expert interpretation and there are few and biased data sets of the different types of Orthopox. In order to improve classification performance and lower computational costs, a hybrid strategy is put forth in this paper that uses Machine Learning models combined with pretrained Deep Learning models to extract deep feature representations without the need for augmented data. The findings show that this feature extraction method, when paired with other methods in the state-of-the-art, produces excellent classification outcomes while preserving training and inference efficiency. The proposed approach demonstrates strong generalization and robustness across multiple evaluation settings, offering a scalable and interpretable solution for real-world clinical deployment.
Genetic Algorithm Based System for Path Planning with Unmanned Aerial Vehicles Swarms in Cell-Grid Environments
Dec 04, 2024



Path Planning methods for autonomously controlling swarms of unmanned aerial vehicles (UAVs) are gaining momentum due to their operational advantages. An increasing number of scenarios now require autonomous control of multiple UAVs, as autonomous operation can significantly reduce labor costs. Additionally, obtaining optimal flight paths can lower energy consumption, thereby extending battery life for other critical operations. Many of these scenarios, however, involve obstacles such as power lines and trees, which complicate Path Planning. This paper presents an evolutionary computation-based system employing genetic algorithms to address this problem in environments with obstacles. The proposed approach aims to ensure complete coverage of areas with fixed obstacles, such as in field exploration tasks, while minimizing flight time regardless of map size or the number of UAVs in the swarm. No specific goal points or prior information beyond the provided map is required. The experiments conducted in this study used five maps of varying sizes and obstacle densities, as well as a control map without obstacles, with different numbers of UAVs. The results demonstrate that this method can determine optimal paths for all UAVs during full map traversal, thus minimizing resource consumption. A comparative analysis with other state-of-the-art approach is presented to highlight the advantages and potential limitations of the proposed method.
Q-learning Based System for Path Planning with UAV Swarms in Obstacle Environments
Mar 30, 2023
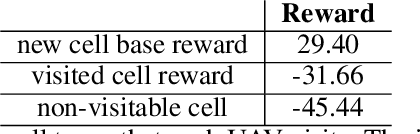

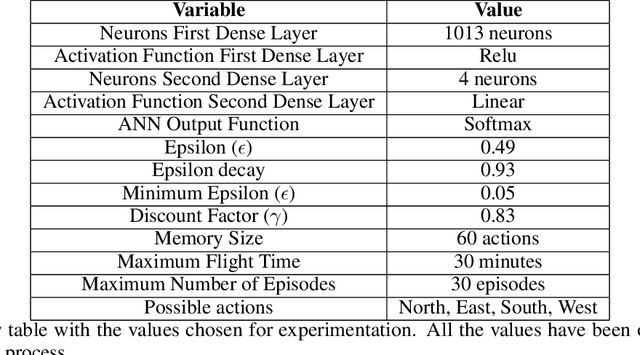
Path Planning methods for autonomous control of Unmanned Aerial Vehicle (UAV) swarms are on the rise because of all the advantages they bring. There are more and more scenarios where autonomous control of multiple UAVs is required. Most of these scenarios present a large number of obstacles, such as power lines or trees. If all UAVs can be operated autonomously, personnel expenses can be decreased. In addition, if their flight paths are optimal, energy consumption is reduced. This ensures that more battery time is left for other operations. In this paper, a Reinforcement Learning based system is proposed for solving this problem in environments with obstacles by making use of Q-Learning. This method allows a model, in this particular case an Artificial Neural Network, to self-adjust by learning from its mistakes and achievements. Regardless of the size of the map or the number of UAVs in the swarm, the goal of these paths is to ensure complete coverage of an area with fixed obstacles for tasks, like field prospecting. Setting goals or having any prior information aside from the provided map is not required. For experimentation, five maps of different sizes with different obstacles were used. The experiments were performed with different number of UAVs. For the calculation of the results, the number of actions taken by all UAVs to complete the task in each experiment is taken into account. The lower the number of actions, the shorter the path and the lower the energy consumption. The results are satisfactory, showing that the system obtains solutions in fewer movements the more UAVs there are. For a better presentation, these results have been compared to another state-of-the-art approach.
Automatic Assessment of Alzheimer's Disease Diagnosis Based on Deep Learning Techniques
May 18, 2021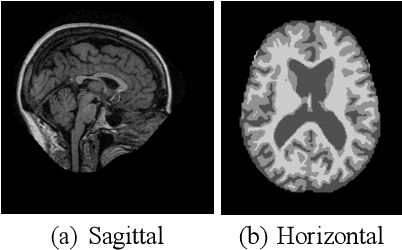
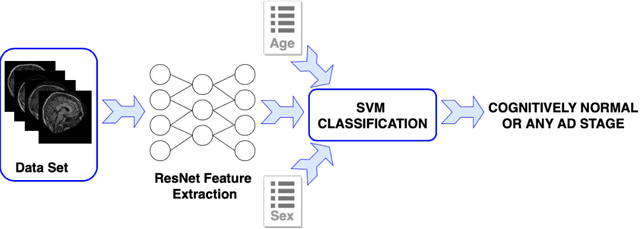
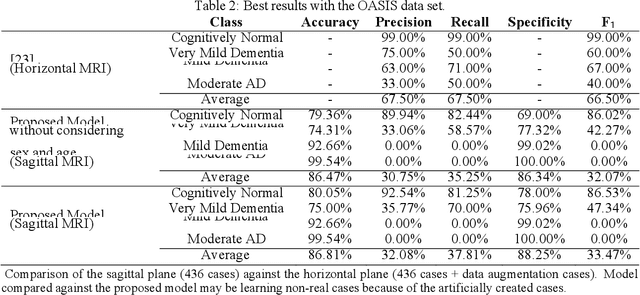
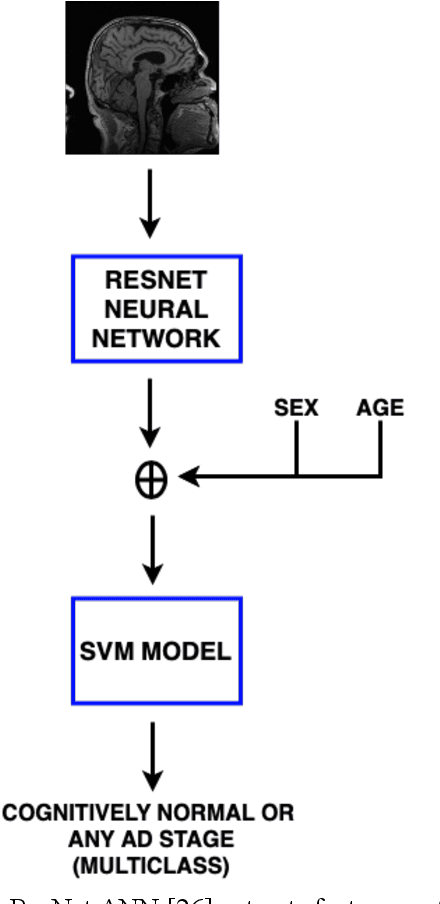
Early detection is crucial to prevent the progression of Alzheimer's disease (AD). Thus, specialists can begin preventive treatment as soon as possible. They demand fast and precise assessment in the diagnosis of AD in the earliest and hardest to detect stages. The main objective of this work is to develop a system that automatically detects the presence of the disease in sagittal magnetic resonance images (MRI), which are not generally used. Sagittal MRIs from ADNI and OASIS data sets were employed. Experiments were conducted using Transfer Learning (TL) techniques in order to achieve more accurate results. There are two main conclusions to be drawn from this work: first, the damages related to AD and its stages can be distinguished in sagittal MRI and, second, the results obtained using DL models with sagittal MRIs are similar to the state-of-the-art, which uses the horizontal-plane MRI. Although sagittal-plane MRIs are not commonly used, this work proved that they were, at least, as effective as MRI from other planes at identifying AD in early stages. This could pave the way for further research. Finally, one should bear in mind that in certain fields, obtaining the examples for a data set can be very expensive. This study proved that DL models could be built in these fields, whereas TL is an essential tool for completing the task with fewer examples.