 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse Manipulation through Symbolic Planning and Residual Operator Learning
Jun 03, 2026Inverting a robotic task requires more than reversing symbolic state transitions or rewinding motor trajectories. In robot manipulation tasks, symbolic inverse plans often fail to fully restore the effects of forward executions under continuous interaction dynamics. We present a hybrid framework for inverse manipulation that derives inverse-skill objectives from STRIPS-like operators automatically extracted from demonstrations through soft geometric predicates. For each extracted operator, we construct an inverse restoration objective that preserves preconditions, restores delete effects, and negates add effects. A task planner first attempts to satisfy this objective using available action primitives. Unresolved symbolic predicates then induce a residual operator learning problem solved through Reinforcement Learning (RL). We evaluate the framework on the ManiSkill3 PushCube task. For a forward pushing skill, the symbolic inverse performs a coarse pick-and-place restoration, while a residual Soft Actor-Critic policy refines the cube pose to satisfy the remaining inverse predicates. Our results show that predicate-derived residual control can turn an approximate symbolic inverse into a physically grounded inverse skill.
MILP, pseudo-boolean, and OMT solvers for optimal fault-tolerant placements of relay nodes in mission critical wireless networks
Jun 20, 2021
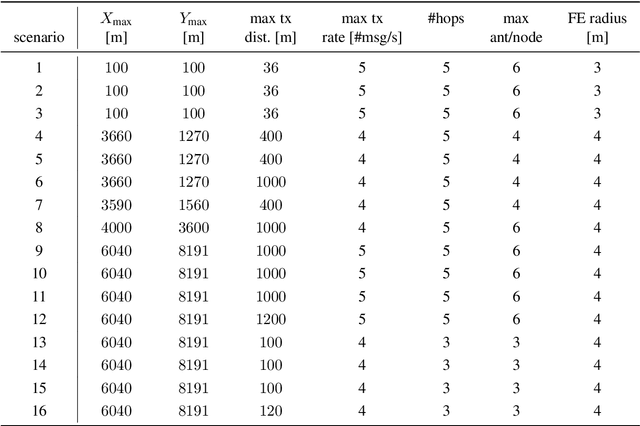
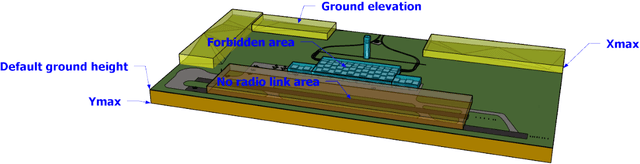
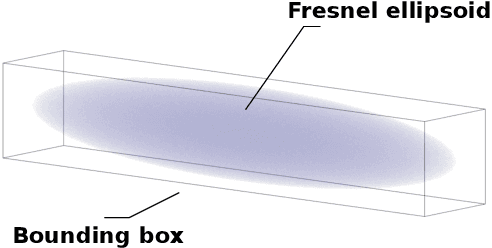
In critical infrastructures like airports, much care has to be devoted in protecting radio communication networks from external electromagnetic interference. Protection of such mission-critical radio communication networks is usually tackled by exploiting radiogoniometers: at least three suitably deployed radiogoniometers, and a gateway gathering information from them, permit to monitor and localise sources of electromagnetic emissions that are not supposed to be present in the monitored area. Typically, radiogoniometers are connected to the gateway through relay nodes. As a result, some degree of fault-tolerance for the network of relay nodes is essential in order to offer a reliable monitoring. On the other hand, deployment of relay nodes is typically quite expensive. As a result, we have two conflicting requirements: minimise costs while guaranteeing a given fault-tolerance. In this paper, we address the problem of computing a deployment for relay nodes that minimises the relay node network cost while at the same time guaranteeing proper working of the network even when some of the relay nodes (up to a given maximum number) become faulty (fault-tolerance). We show that, by means of a computation-intensive pre-processing on a HPC infrastructure, the above optimisation problem can be encoded as a 0/1 Linear Program, becoming suitable to be approached with standard Artificial Intelligence reasoners like MILP, PB-SAT, and SMT/OMT solvers. Our problem formulation enables us to present experimental results comparing the performance of these three solving technologies on a real case study of a relay node network deployment in areas of the Leonardo da Vinci Airport in Rome, Italy.
* 33 pages, 11 figures
Multimodal Interaction with Multiple Co-located Drones in Search and Rescue Missions
May 24, 2016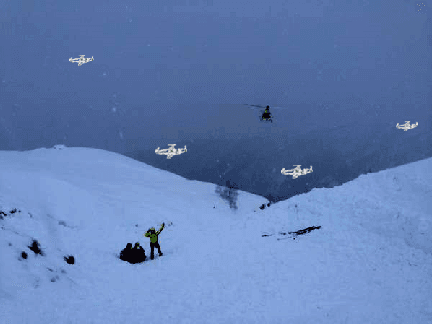
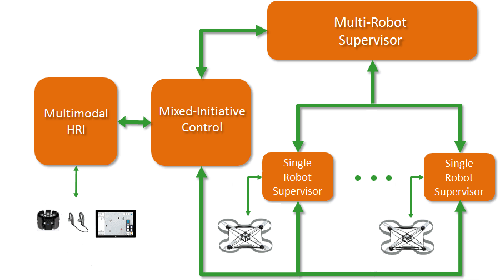
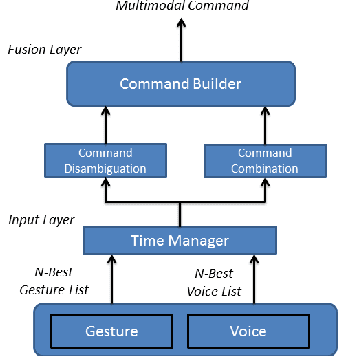
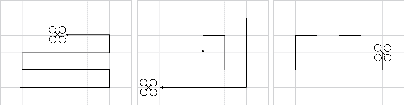
We present a multimodal interaction framework suitable for a human rescuer that operates in proximity with a set of co-located drones during search missions. This work is framed in the context of the SHERPA project whose goal is to develop a mixed ground and aerial robotic platform to support search and rescue activities in a real-world alpine scenario. Differently from typical human-drone interaction settings, here the operator is not fully dedicated to the drones, but involved in search and rescue tasks, hence only able to provide sparse, incomplete, although high-value, instructions to the robots. This operative scenario requires a human-interaction framework that supports multimodal communication along with an effective and natural mixed-initiative interaction between the human and the robots. In this work, we illustrate the domain and the proposed multimodal interaction framework discussing the system at work in a simulated case study.
Structure-Based Causes and Explanations in the Independent Choice Logic
Oct 19, 2012
This paper is directed towards combining Pearl's structural-model approach to causal reasoning with high-level formalisms for reasoning about actions. More precisely, we present a combination of Pearl's structural-model approach with Poole's independent choice logic. We show how probabilistic theories in the independent choice logic can be mapped to probabilistic causal models. This mapping provides the independent choice logic with appealing concepts of causality and explanation from the structural-model approach. We illustrate this along Halpern and Pearl's sophisticated notions of actual cause, explanation, and partial explanation. This mapping also adds first-order modeling capabilities and explicit actions to the structural-model approach.