 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraining Robots without Robots: Deep Imitation Learning for Master-to-Robot Policy Transfer
Feb 19, 2022



Deep imitation learning is a promising method for dexterous robot manipulation because it only requires demonstration samples for learning manipulation skills. In this paper, deep imitation learning is applied to tasks that require force feedback, such as bottle opening. However, simple visual feedback systems, such as teleoperation, cannot be applied because they do not provide force feedback to operators. Bilateral teleoperation has been used for demonstration with force feedback; however, this requires an expensive and complex bilateral robot system. In this paper, a new master-to-robot (M2R) transfer learning system is presented that does not require robots but can still teach dexterous force feedback-based manipulation tasks to robots. The human directly demonstrates a task using a low-cost controller that resembles the kinematic parameters of the robot arm. Using this controller, the operator can naturally feel the force feedback without any expensive bilateral system. Furthermore, the M2R transfer system can overcome domain gaps between the master and robot using the gaze-based imitation learning framework and a simple calibration method. To demonstrate this, the proposed system was evaluated on a bottle-cap-opening task that requires force feedback only for the master demonstration.
Third-party Evaluation of Robotic Hand Designs Using a Mechanical Glove
Sep 22, 2021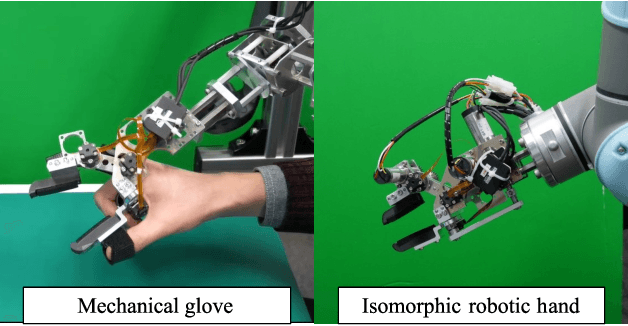



A robotic hand design suitable for dexterity should be examined using functional tests. To achieve this, we designed a mechanical glove, which is a rigid wearable glove that enables us to develop the corresponding isomorphic robotic hand and evaluate its hardware properties. Subsequently, the effectiveness of multiple degrees-of-freedom (DOFs) was evaluated by human participants. Several fine motor skills were evaluated using the mechanical glove under two conditions: one- and three-DOF conditions. To the best of our knowledge, this is the first extensive evaluation method for robotic hand designs suitable for dexterity. (This paper was peer-reviewed and is the full translation from the Journal of the Robotics Society of Japan, Vol.39, No.6, pp.557-560, 2021.)
* 5 pages, 7 figures