 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTinyLidarNet: 2D LiDAR-based End-to-End Deep Learning Model for F1TENTH Autonomous Racing
Oct 09, 2024



Prior research has demonstrated the effectiveness of end-to-end deep learning for robotic navigation, where the control signals are directly derived from raw sensory data. However, the majority of existing end-to-end navigation solutions are predominantly camera-based. In this paper, we introduce TinyLidarNet, a lightweight 2D LiDAR-based end-to-end deep learning model for autonomous racing. An F1TENTH vehicle using TinyLidarNet won 3rd place in the 12th F1TENTH Autonomous Grand Prix competition, demonstrating its competitive performance. We systematically analyze its performance on untrained tracks and computing requirements for real-time processing. We find that TinyLidarNet's 1D Convolutional Neural Network (CNN) based architecture significantly outperforms widely used Multi-Layer Perceptron (MLP) based architecture. In addition, we show that it can be processed in real-time on low-end micro-controller units (MCUs).
VALO: A Versatile Anytime Framework for LiDAR-based Object Detection Deep Neural Networks
Sep 17, 2024
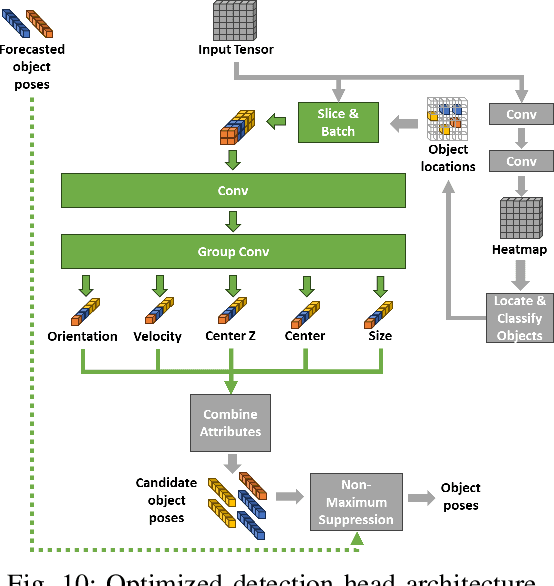
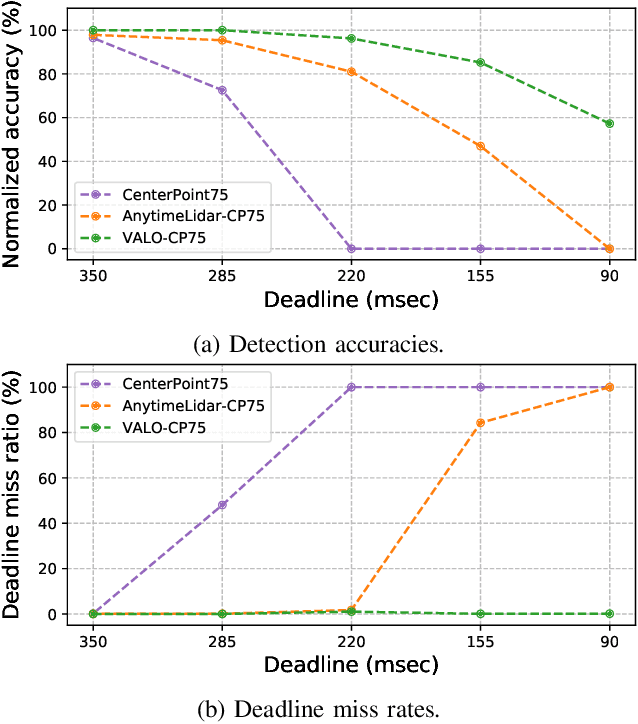
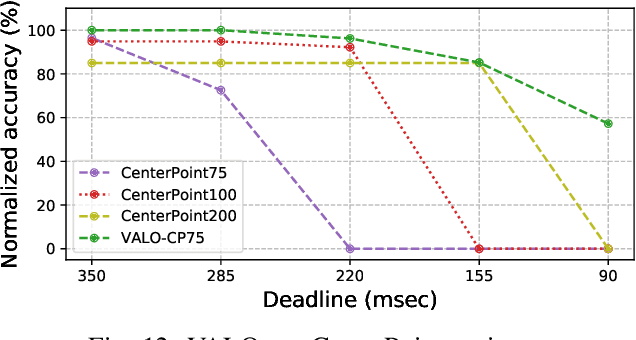
This work addresses the challenge of adapting dynamic deadline requirements for LiDAR object detection deep neural networks (DNNs). The computing latency of object detection is critically important to ensure safe and efficient navigation. However, state-of-the-art LiDAR object detection DNNs often exhibit significant latency, hindering their real-time performance on resource-constrained edge platforms. Therefore, a tradeoff between detection accuracy and latency should be dynamically managed at runtime to achieve optimum results. In this paper, we introduce VALO (Versatile Anytime algorithm for LiDAR Object detection), a novel data-centric approach that enables anytime computing of 3D LiDAR object detection DNNs. VALO employs a deadline-aware scheduler to selectively process input regions, making execution time and accuracy tradeoffs without architectural modifications. Additionally, it leverages efficient forecasting of past detection results to mitigate possible loss of accuracy due to partial processing of input. Finally, it utilizes a novel input reduction technique within its detection heads to significantly accelerate execution without sacrificing accuracy. We implement VALO on state-of-the-art 3D LiDAR object detection networks, namely CenterPoint and VoxelNext, and demonstrate its dynamic adaptability to a wide range of time constraints while achieving higher accuracy than the prior state-of-the-art. Code is available athttps://github.com/CSL-KU/VALO}{github.com/CSL-KU/VALO.
Anytime-Lidar: Deadline-aware 3D Object Detection
Aug 25, 2022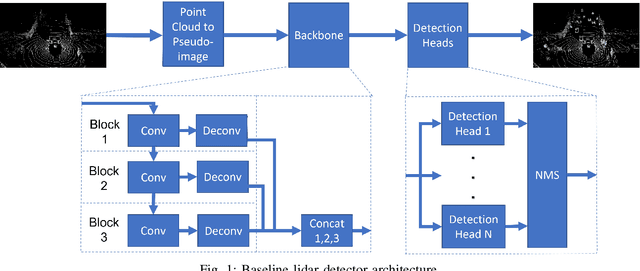
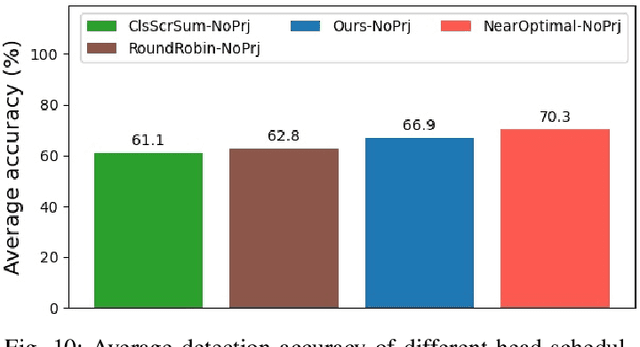
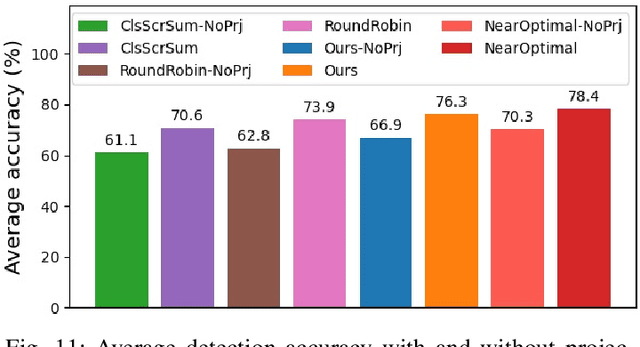
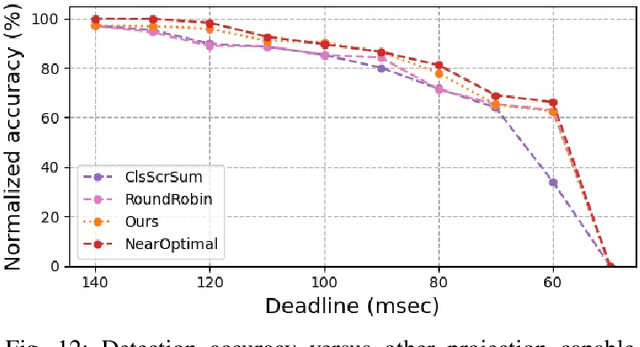
In this work, we present a novel scheduling framework enabling anytime perception for deep neural network (DNN) based 3D object detection pipelines. We focus on computationally expensive region proposal network (RPN) and per-category multi-head detector components, which are common in 3D object detection pipelines, and make them deadline-aware. We propose a scheduling algorithm, which intelligently selects the subset of the components to make effective time and accuracy trade-off on the fly. We minimize accuracy loss of skipping some of the neural network sub-components by projecting previously detected objects onto the current scene through estimations. We apply our approach to a state-of-art 3D object detection network, PointPillars, and evaluate its performance on Jetson Xavier AGX using nuScenes dataset. Compared to the baselines, our approach significantly improve the network's accuracy under various deadline constraints.
High-level Modeling of Manufacturing Faults in Deep Neural Network Accelerators
Jun 05, 2020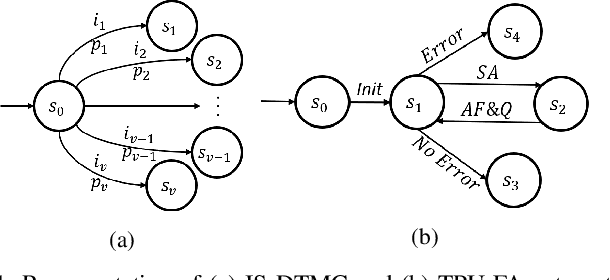
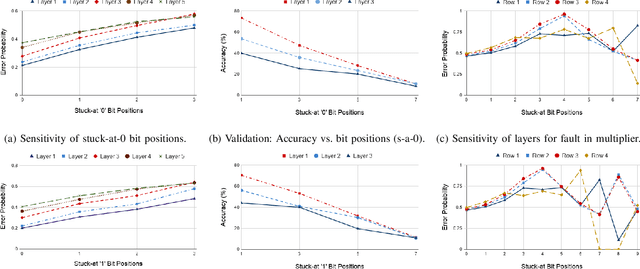
The advent of data-driven real-time applications requires the implementation of Deep Neural Networks (DNNs) on Machine Learning accelerators. Google's Tensor Processing Unit (TPU) is one such neural network accelerator that uses systolic array-based matrix multiplication hardware for computation in its crux. Manufacturing faults at any state element of the matrix multiplication unit can cause unexpected errors in these inference networks. In this paper, we propose a formal model of permanent faults and their propagation in a TPU using the Discrete-Time Markov Chain (DTMC) formalism. The proposed model is analyzed using the probabilistic model checking technique to reason about the likelihood of faulty outputs. The obtained quantitative results show that the classification accuracy is sensitive to the type of permanent faults as well as their location, bit position and the number of layers in the neural network. The conclusions from our theoretical model have been validated using experiments on a digit recognition-based DNN.