 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmoothness-Adaptive Stochastic Bandits
Oct 22, 2019
We consider the problem of non-parametric multi-armed bandits with stochastic covariates, where a key factor in determining the complexity of the problem and in the design of effective policies is the smoothness of payoff functions. Previous work treats this problem when the smoothness of payoff functions are a priori known. In practical settings, however, the smoothness that characterizes the class of functions to which payoff functions belong is not known in advance, and misspecification of this smoothness may cause the performance of existing methods to severely deteriorate. In this work, we address the challenge of adapting to a priori unknown smoothness in the payoff functions. Our approach is based on the notion of \textit{self-similarity} that appears in the literature on adaptive non-parametric confidence intervals. We develop a procedure that infers a global smoothness parameter of the payoff functions based on collected observations, and establish that this procedure achieves rate-optimal performance up to logarithmic factors. We further extend this method in order to account for local complexity of the problem which depends on how smooth payoff functions are in different regions of the covariate space. We show that under reasonable assumptions on the way this smoothness changes over the covariate space, our method achieves significantly improved performance that is characterized by the local complexity of the problem as opposed to its global complexity.
Adaptive Sequential Experiments with Unknown Information Flows
Jun 28, 2019
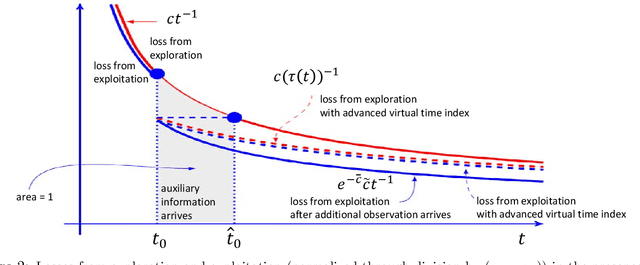
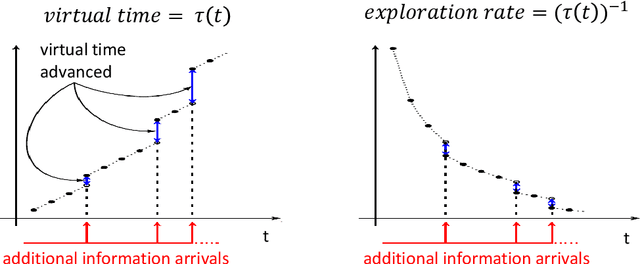
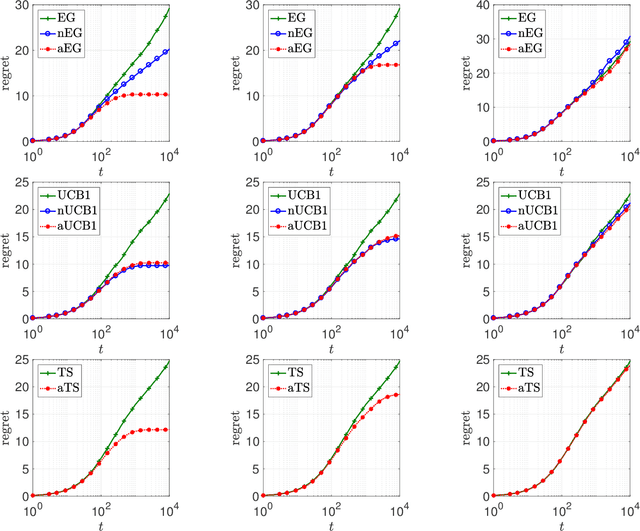
Systems that make sequential decisions in the presence of partial feedback on actions often need to strike a balance between maximizing immediate payoffs based on available information, and acquiring new information that may be essential for maximizing future payoffs. This trade-off is captured by the multi-armed bandit (MAB) framework that has been studied and applied for designing sequential experiments when at each time epoch a single observation is collected on the action that was selected at that epoch. However, in many practical settings additional information may become available between decision epochs. We introduce a generalized MAB formulation in which auxiliary information on each arm may appear arbitrarily over time. By obtaining matching lower and upper bounds, we characterize the minimax complexity of this family of MAB problems as a function of the information arrival process, and study how salient characteristics of this process impact policy design and achievable performance. We establish the robustness of a Thompson sampling policy in the presence of additional information, but observe that other policies that are of practical importance do not exhibit such robustness. We therefore introduce a broad adaptive exploration approach for designing policies that, without any prior knowledge on the information arrival process, attain the best performance (in terms of regret rate) that is achievable when the information arrival process is a priori known. Our approach is based on adjusting MAB policies designed to perform well in the absence of auxiliary information by using dynamically customized virtual time indexes to endogenously control the exploration rate of the policy. We demonstrate our approach through appropriately adjusting known MAB policies and establishing improved performance bounds for these policies in the presence of auxiliary information.