 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReprogrammable sequencing for physically intelligent under-actuated robots
Sep 05, 2024



Programming physical intelligence into mechanisms holds great promise for machines that can accomplish tasks such as navigation of unstructured environments while utilizing a minimal amount of computational resources and electronic components. In this study, we introduce a novel design approach for physically intelligent under-actuated mechanisms capable of autonomously adjusting their motion in response to environmental interactions. Specifically, multistability is harnessed to sequence the motion of different degrees of freedom in a programmed order. A key aspect of this approach is that these sequences can be passively reprogrammed through mechanical stimuli that arise from interactions with the environment. To showcase our approach, we construct a four degree of freedom robot capable of autonomously navigating mazes and moving away from obstacles. Remarkably, this robot operates without relying on traditional computational architectures and utilizes only a single linear actuator.
GNN-based physics solver for time-independent PDEs
Mar 28, 2023



Physics-based deep learning frameworks have shown to be effective in accurately modeling the dynamics of complex physical systems with generalization capability across problem inputs. However, time-independent problems pose the challenge of requiring long-range exchange of information across the computational domain for obtaining accurate predictions. In the context of graph neural networks (GNNs), this calls for deeper networks, which, in turn, may compromise or slow down the training process. In this work, we present two GNN architectures to overcome this challenge - the Edge Augmented GNN and the Multi-GNN. We show that both these networks perform significantly better (by a factor of 1.5 to 2) than baseline methods when applied to time-independent solid mechanics problems. Furthermore, the proposed architectures generalize well to unseen domains, boundary conditions, and materials. Here, the treatment of variable domains is facilitated by a novel coordinate transformation that enables rotation and translation invariance. By broadening the range of problems that neural operators based on graph neural networks can tackle, this paper provides the groundwork for their application to complex scientific and industrial settings.
Learning time-dependent PDE solver using Message Passing Graph Neural Networks
Apr 15, 2022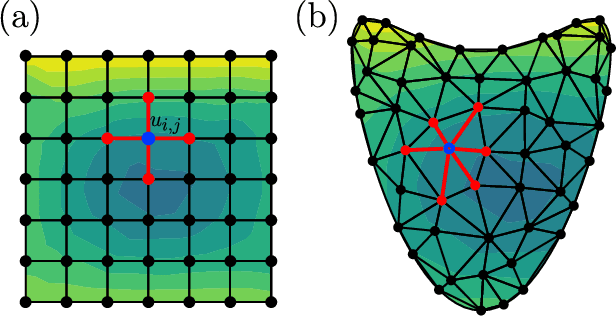
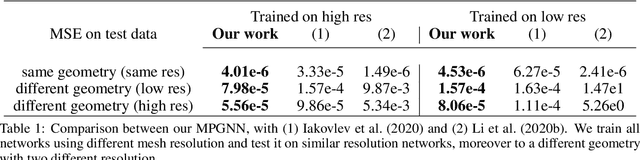
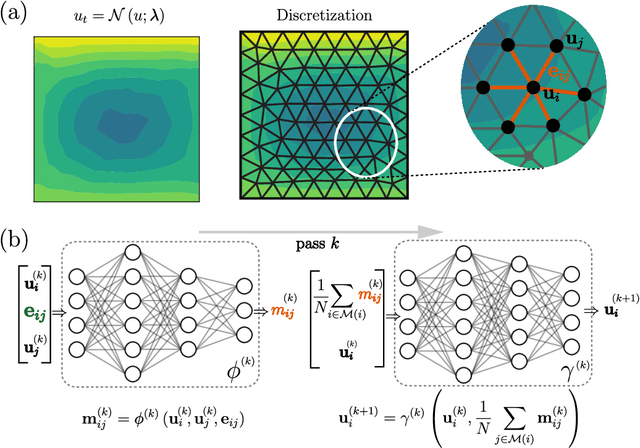
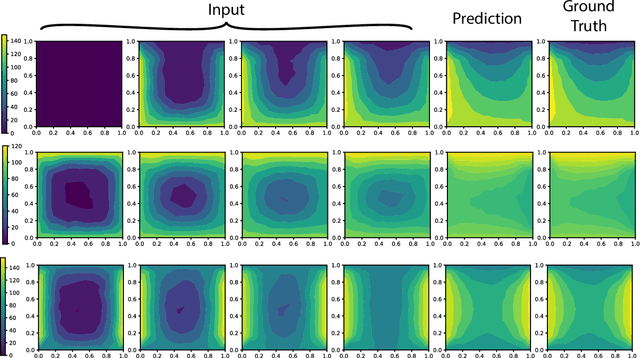
One of the main challenges in solving time-dependent partial differential equations is to develop computationally efficient solvers that are accurate and stable. Here, we introduce a graph neural network approach to finding efficient PDE solvers through learning using message-passing models. We first introduce domain invariant features for PDE-data inspired by classical PDE solvers for an efficient physical representation. Next, we use graphs to represent PDE-data on an unstructured mesh and show that message passing graph neural networks (MPGNN) can parameterize governing equations, and as a result, efficiently learn accurate solver schemes for linear/nonlinear PDEs. We further show that the solvers are independent of the initial trained geometry, i.e. the trained solver can find PDE solution on different complex domains. Lastly, we show that a recurrent graph neural network approach can find a temporal sequence of solutions to a PDE.