 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepHybrid: Deep Learning on Automotive Radar Spectra and Reflections for Object Classification
Feb 17, 2022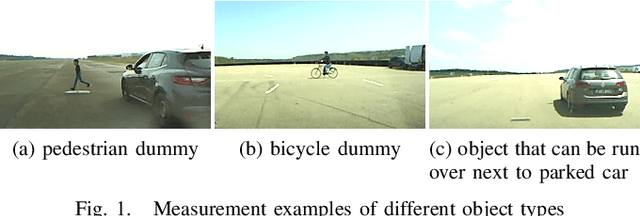

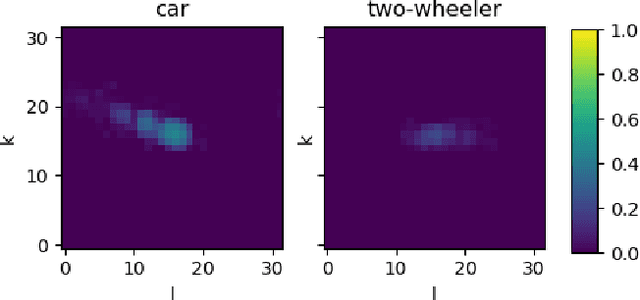
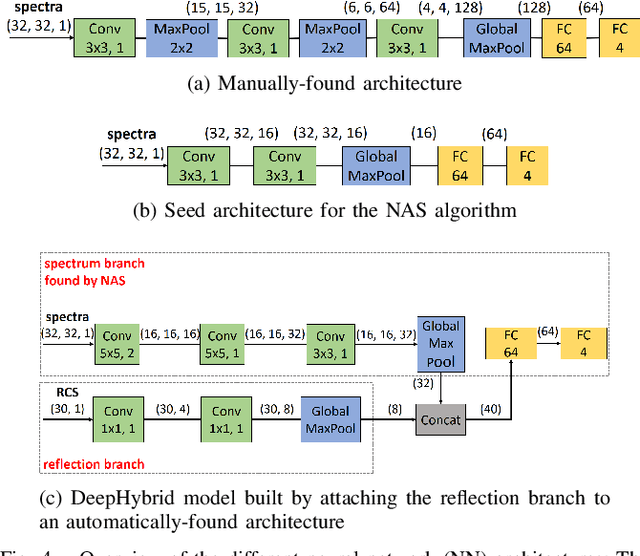
Automated vehicles need to detect and classify objects and traffic participants accurately. Reliable object classification using automotive radar sensors has proved to be challenging. We propose a method that combines classical radar signal processing and Deep Learning algorithms. The range-azimuth information on the radar reflection level is used to extract a sparse region of interest from the range-Doppler spectrum. This is used as input to a neural network (NN) that classifies different types of stationary and moving objects. We present a hybrid model (DeepHybrid) that receives both radar spectra and reflection attributes as inputs, e.g. radar cross-section. Experiments show that this improves the classification performance compared to models using only spectra. Moreover, a neural architecture search (NAS) algorithm is applied to find a resource-efficient and high-performing NN. NAS yields an almost one order of magnitude smaller NN than the manually-designed one while preserving the accuracy. The proposed method can be used for example to improve automatic emergency braking or collision avoidance systems.
Investigation of Uncertainty of Deep Learning-based Object Classification on Radar Spectra
Jun 01, 2021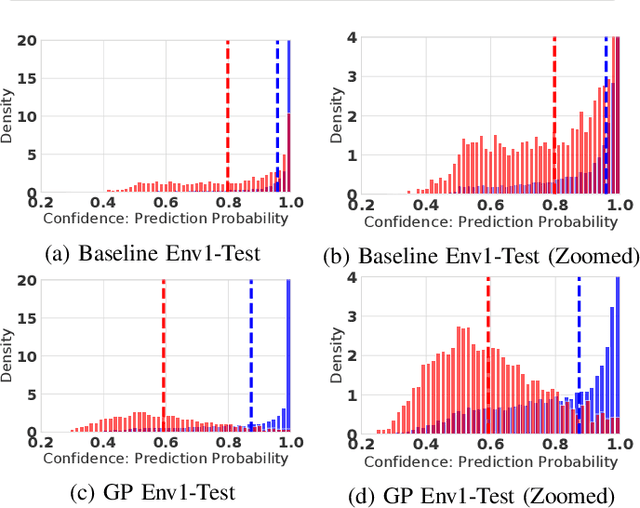
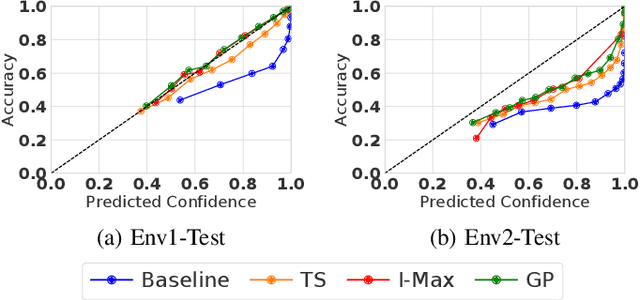
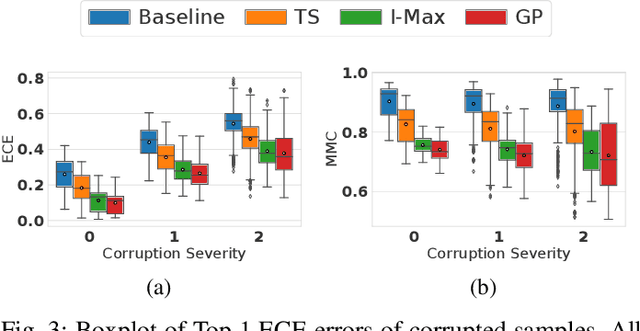

Deep learning (DL) has recently attracted increasing interest to improve object type classification for automotive radar.In addition to high accuracy, it is crucial for decision making in autonomous vehicles to evaluate the reliability of the predictions; however, decisions of DL networks are non-transparent. Current DL research has investigated how uncertainties of predictions can be quantified, and in this article, we evaluate the potential of these methods for safe, automotive radar perception. In particular we evaluate how uncertainty quantification can support radar perception under (1) domain shift, (2) corruptions of input signals, and (3) in the presence of unknown objects. We find that in agreement with phenomena observed in the literature,deep radar classifiers are overly confident, even in their wrong predictions. This raises concerns about the use of the confidence values for decision making under uncertainty, as the model fails to notify when it cannot handle an unknown situation. Accurate confidence values would allow optimal integration of multiple information sources, e.g. via sensor fusion. We show that by applying state-of-the-art post-hoc uncertainty calibration, the quality of confidence measures can be significantly improved,thereby partially resolving the over-confidence problem. Our investigation shows that further research into training and calibrating DL networks is necessary and offers great potential for safe automotive object classification with radar sensors.
* 6 pages