 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Robot Assistance: Expertise and Influence in Multi-User Task Planning
Oct 16, 2023This paper addresses the challenge of enabling a single robot to effectively assist multiple humans in decision-making for task planning domains. We introduce a comprehensive framework designed to enhance overall team performance by considering both human expertise in making the optimal decisions and robot influence on human decision-making. Our model integrates these factors seamlessly within the task-planning domain, formulating the problem as a partially observable Markov decision process (POMDP) while treating expertise and influence as unobservable components of the system state. To solve for the robot's actions in such systems, we propose an efficient Attention-Switching policy. This policy capitalizes on the inherent structure of such systems, solving multiple smaller POMDPs to generate heuristics for prioritizing interactions with different human teammates, thereby reducing the state space and improving scalability. Our empirical results on a simulated kit fulfillment task demonstrate improved team performance when the robot's policy accounts for both expertise and influence. This research represents a significant step forward in the field of adaptive robot assistance, paving the way for integration into cost-effective small and mid-scale industries, where substantial investments in robotic infrastructure may not be economically viable.
Optimal Robot Path Planning In a Collaborative Human-Robot Team with Intermittent Human Availability
Jul 10, 2023This paper presents a solution for the problem of optimal planning for a robot in a collaborative human-robot team, where the human supervisor is intermittently available to assist the robot in completing tasks more quickly. Specifically, we address the challenge of computing the fastest path between two configurations in an environment with time constraints on how long the robot can wait for assistance. To solve this problem, we propose a novel approach that utilizes the concepts of budget and critical departure times, which enables us to obtain optimal solutions while scaling to larger problem instances than existing methods. We demonstrate the effectiveness of our approach by comparing it with several baseline algorithms on a city road network and analyzing the quality of the solutions obtained. Our work contributes to the field of robot planning by addressing the critical issue of incorporating human assistance and environmental restrictions, which has significant implications for real-world applications.
On the Impact of Interruptions During Multi-Robot Supervision Tasks
Jun 28, 2023Human supervisors in multi-robot systems are primarily responsible for monitoring robots, but can also be assigned with secondary tasks. These tasks can act as interruptions and can be categorized as either intrinsic, i.e., being directly related to the monitoring task, or extrinsic, i.e., being unrelated. In this paper, we investigate the impact of these two types of interruptions through a user study ($N=39$), where participants monitor a number of remote mobile robots while intermittently being interrupted by either a robot fault correction task (intrinsic) or a messaging task (extrinsic). We find that task performance of participants does not change significantly with the interruptions but depends greatly on the number of robots. However, interruptions result in an increase in perceived workload, and extrinsic interruptions have a more negative effect on workload across all NASA-TLX scales. Participants also reported switching between extrinsic interruptions and the primary task to be more difficult compared to the intrinsic interruption case. Statistical significance of these results is confirmed using ANOVA and one-sample t-test. These findings suggest that when deciding task assignment in such supervision systems, one should limit interruptions from secondary tasks, especially extrinsic ones, in order to limit user workload.
A Survey of Multi-Agent Human-Robot Interaction Systems
Dec 10, 2022



This article presents a survey of literature in the area of Human-Robot Interaction (HRI), specifically on systems containing more than two agents (i.e., having multiple humans and/or multiple robots). We identify three core aspects of ``Multi-agent" HRI systems that are useful for understanding how these systems differ from dyadic systems and from one another. These are the Team structure, Interaction style among agents, and the system's Computational characteristics. Under these core aspects, we present five attributes of HRI systems, namely Team size, Team composition, Interaction model, Communication modalities, and Robot control. These attributes are used to characterize and distinguish one system from another. We populate resulting categories with examples from recent literature along with a brief discussion of their applications and analyze how these attributes differ from the case of dyadic human-robot systems. We summarize key observations from the current literature, and identify challenges and promising areas for future research in this domain. In order to realize the vision of robots being part of the society and interacting seamlessly with humans, there is a need to expand research on multi-human -- multi-robot systems. Not only do these systems require coordination among several agents, they also involve multi-agent and indirect interactions which are absent from dyadic HRI systems. Adding multiple agents in HRI systems requires advanced interaction schemes, behavior understanding and control methods to allow natural interactions among humans and robots. In addition, research on human behavioral understanding in mixed human-robot teams also requires more attention. This will help formulate and implement effective robot control policies in HRI systems with large numbers of heterogeneous robots and humans; a team composition reflecting many real-world scenarios.
Scheduling Operator Assistance for Shared Autonomy in Multi-Robot Teams
Sep 07, 2022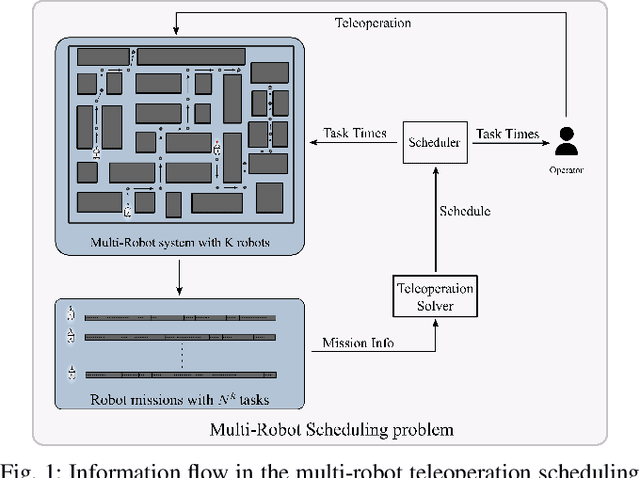
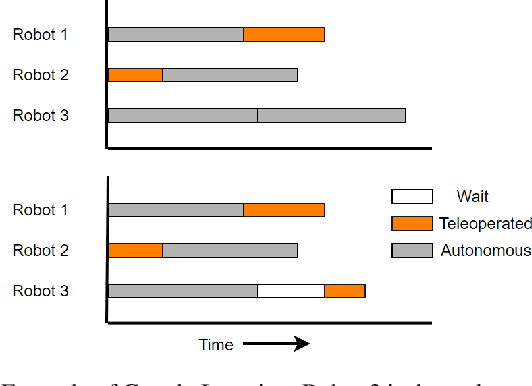
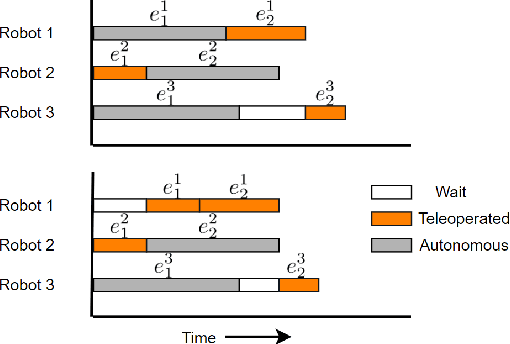
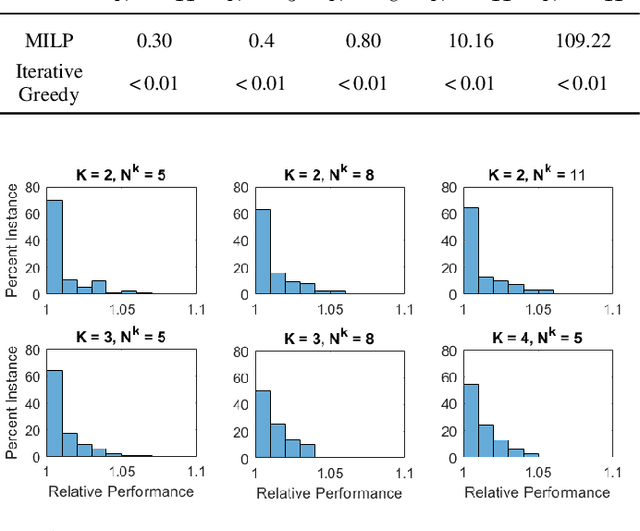
In this paper, we consider the problem of allocating human operator assistance in a system with multiple autonomous robots. Each robot is required to complete independent missions, each defined as a sequence of tasks. While executing a task, a robot can either operate autonomously or be teleoperated by the human operator to complete the task at a faster rate. We show that the problem of creating a teleoperation schedule that minimizes makespan of the system is NP-Hard. We formulate our problem as a Mixed Integer Linear Program, which can be used to optimally solve small to moderate sized problem instances. We also develop an anytime algorithm that makes use of the problem structure to provide a fast and high-quality solution of the operator scheduling problem, even for larger problem instances. Our key insight is to identify blocking tasks in greedily-created schedules and iteratively remove those blocks to improve the quality of the solution. Through numerical simulations, we demonstrate the benefits of the proposed algorithm as an efficient and scalable approach that outperforms other greedy methods.
Scalable Operator Allocation for Multi-Robot Assistance: A Restless Bandit Approach
Nov 11, 2021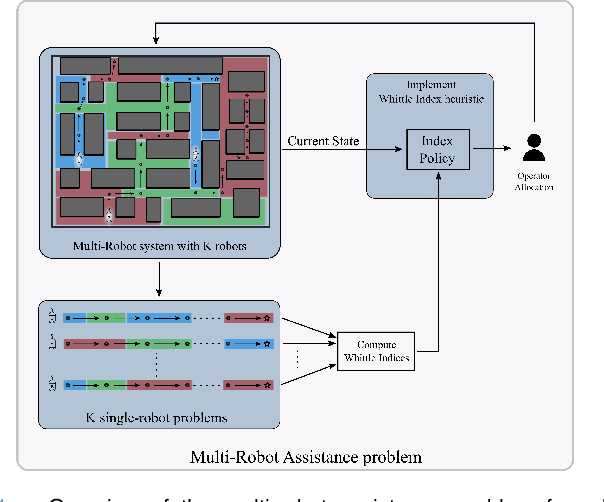
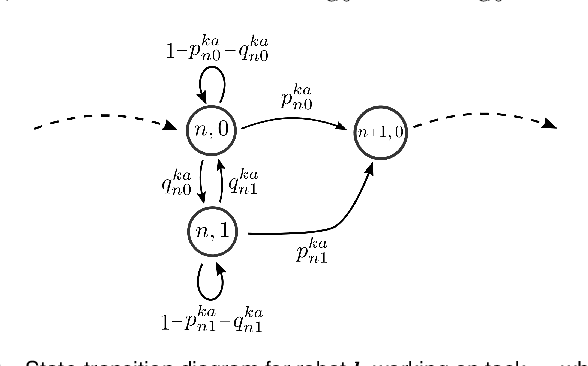
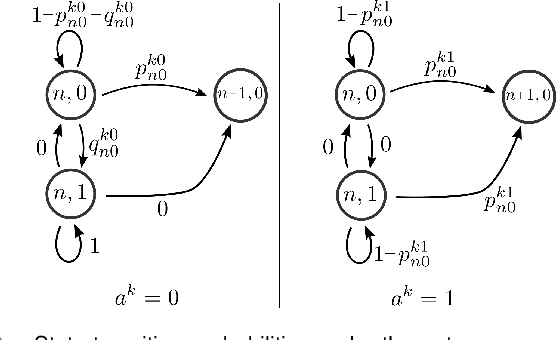
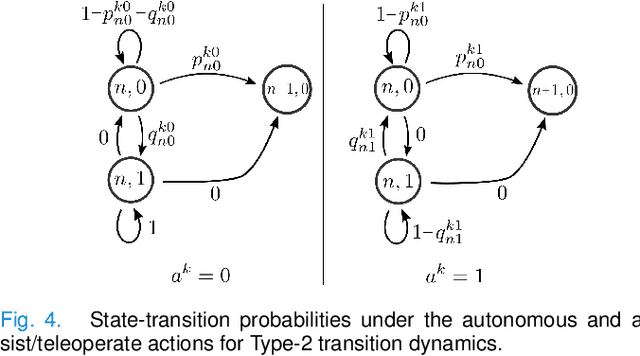
In this paper, we consider the problem of allocating human operators in a system with multiple semi-autonomous robots. Each robot is required to perform an independent sequence of tasks, subjected to a chance of failing and getting stuck in a fault state at every task. If and when required, a human operator can assist or teleoperate a robot. Conventional MDP techniques used to solve such problems face scalability issues due to exponential growth of state and action spaces with the number of robots and operators. In this paper we derive conditions under which the operator allocation problem is indexable, enabling the use of the Whittle index heuristic. The conditions can be easily checked to verify indexability, and we show that they hold for a wide range of problems of interest. Our key insight is to leverage the structure of the value function of individual robots, resulting in conditions that can be verified separately for each state of each robot. We apply these conditions to two types of transitions commonly seen in remote robot supervision systems. Through numerical simulations, we demonstrate the efficacy of Whittle index policy as a near-optimal and scalable approach that outperforms existing scalable methods.
Comparing Writing Styles using Word Embedding and Dynamic Time Warping
Nov 05, 2015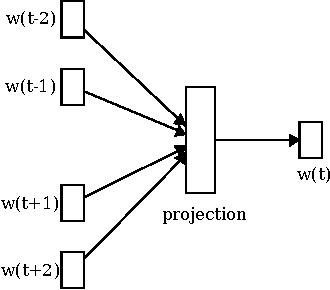
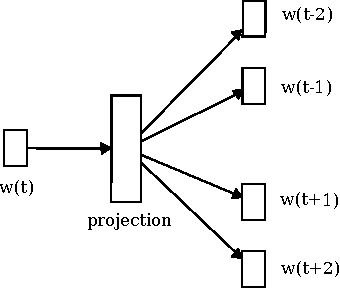
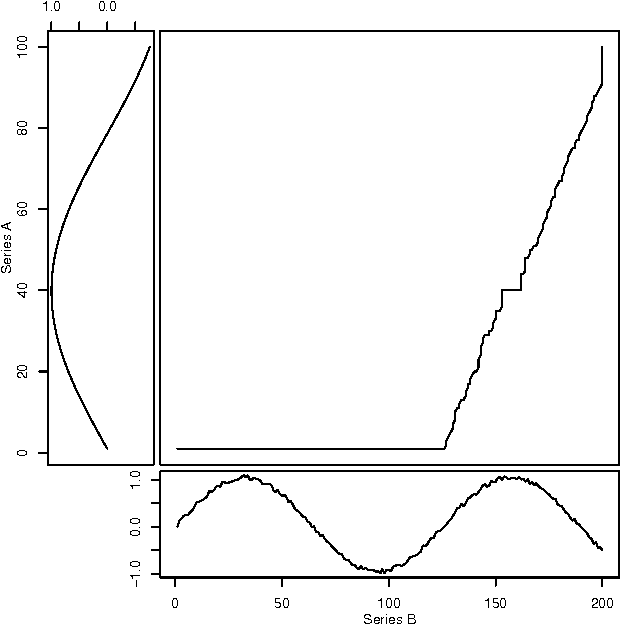
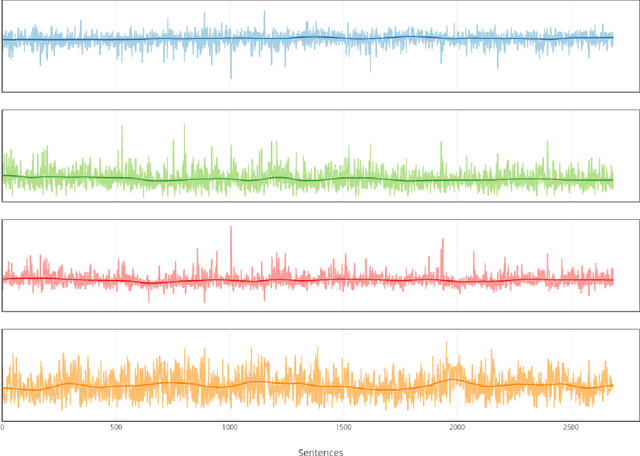
The development of plot or story in novels is reflected in the content and the words used. The flow of sentiments, which is one aspect of writing style, can be quantified by analyzing the flow of words. This study explores literary works as signals in word embedding space and tries to compare writing styles of popular classic novels using dynamic time warping.