 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmpirical Analysis of Sim-and-Real Cotraining Of Diffusion Policies For Planar Pushing from Pixels
Mar 28, 2025In imitation learning for robotics, cotraining with demonstration data generated both in simulation and on real hardware has emerged as a powerful recipe to overcome the sim2real gap. This work seeks to elucidate basic principles of this sim-and-real cotraining to help inform simulation design, sim-and-real dataset creation, and policy training. Focusing narrowly on the canonical task of planar pushing from camera inputs enabled us to be thorough in our study. These experiments confirm that cotraining with simulated data \emph{can} dramatically improve performance in real, especially when real data is limited. Performance gains scale with simulated data, but eventually plateau; real-world data increases this performance ceiling. The results also suggest that reducing the domain gap in physics may be more important than visual fidelity for non-prehensile manipulation tasks. Perhaps surprisingly, having some visual domain gap actually helps the cotrained policy -- binary probes reveal that high-performing policies learn to distinguish simulated domains from real. We conclude by investigating this nuance and mechanisms that facilitate positive transfer between sim-and-real. In total, our experiments span over 40 real-world policies (evaluated on 800+ trials) and 200 simulated policies (evaluated on 40,000+ trials).
Stronger Generalization Guarantees for Robot Learning by Combining Generative Models and Real-World Data
Nov 16, 2021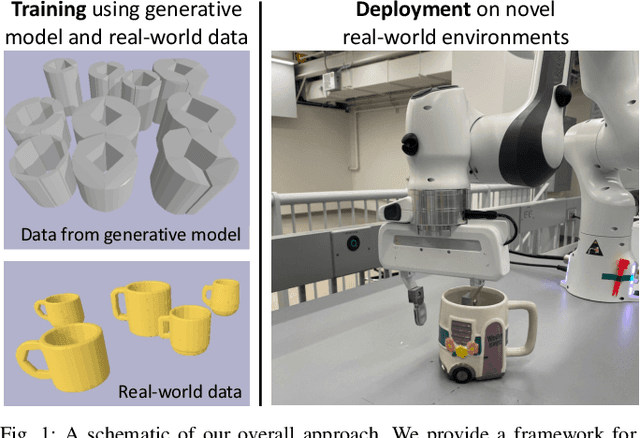

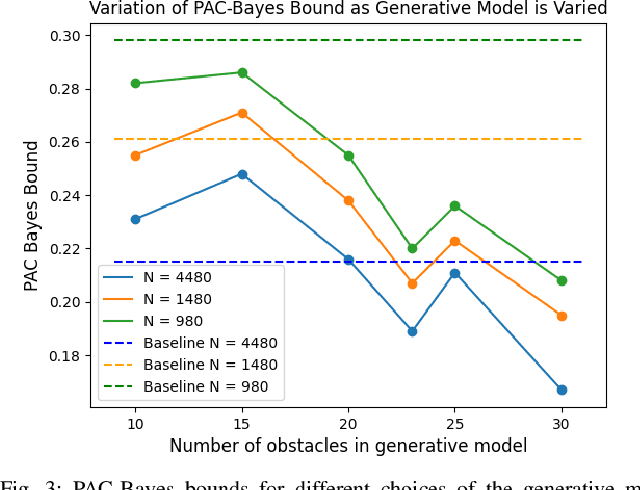
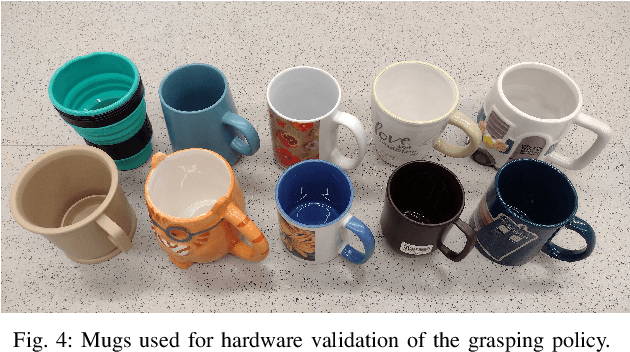
We are motivated by the problem of learning policies for robotic systems with rich sensory inputs (e.g., vision) in a manner that allows us to guarantee generalization to environments unseen during training. We provide a framework for providing such generalization guarantees by leveraging a finite dataset of real-world environments in combination with a (potentially inaccurate) generative model of environments. The key idea behind our approach is to utilize the generative model in order to implicitly specify a prior over policies. This prior is updated using the real-world dataset of environments by minimizing an upper bound on the expected cost across novel environments derived via Probably Approximately Correct (PAC)-Bayes generalization theory. We demonstrate our approach on two simulated systems with nonlinear/hybrid dynamics and rich sensing modalities: (i) quadrotor navigation with an onboard vision sensor, and (ii) grasping objects using a depth sensor. Comparisons with prior work demonstrate the ability of our approach to obtain stronger generalization guarantees by utilizing generative models. We also present hardware experiments for validating our bounds for the grasping task.