 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconfigurable Intelligent Surface Aided Wireless Sensing for Scene Depth Estimation
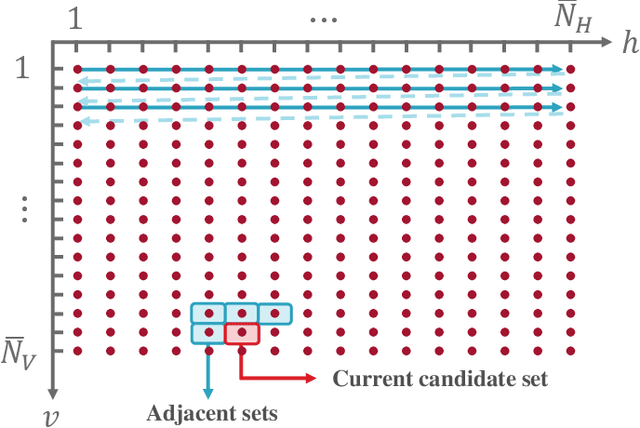
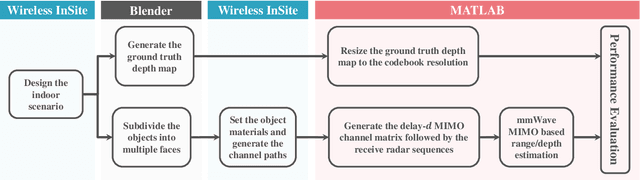
Nov 15, 2022Current scene depth estimation approaches mainly rely on optical sensing, which carries privacy concerns and suffers from estimation ambiguity for distant, shiny, and transparent surfaces/objects. Reconfigurable intelligent surfaces (RISs) provide a path for employing a massive number of antennas using low-cost and energy-efficient architectures. This has the potential for realizing RIS-aided wireless sensing with high spatial resolution. In this paper, we propose to employ RIS-aided wireless sensing systems for scene depth estimation. We develop a comprehensive framework for building accurate depth maps using RIS-aided mmWave sensing systems. In this framework, we propose a new RIS interaction codebook capable of creating a sensing grid of reflected beams that meets the desirable characteristics of efficient scene depth map construction. Using the designed codebook, the received signals are processed to build high-resolution depth maps. Simulation results compare the proposed solution against RGB-based approaches and highlight the promise of adopting RIS-aided mmWave sensing in scene depth perception.
Millimeter Wave MIMO based Depth Maps for Wireless Virtual and Augmented Reality
Feb 13, 2021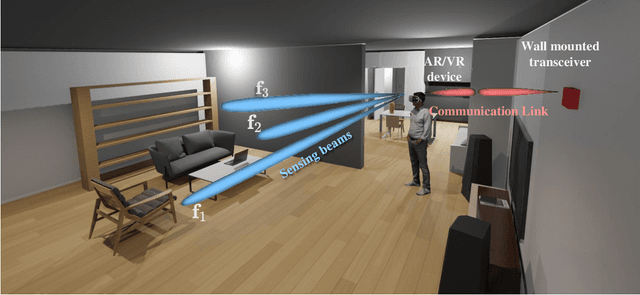

Augmented and virtual reality systems (AR/VR) are rapidly becoming key components of the wireless landscape. For immersive AR/VR experience, these devices should be able to construct accurate depth perception of the surrounding environment. Current AR/VR devices rely heavily on using RGB-D depth cameras to achieve this goal. The performance of these depth cameras, however, has clear limitations in several scenarios, such as the cases with shiny objects, dark surfaces, and abrupt color transition among other limitations. In this paper, we propose a novel solution for AR/VR depth map construction using mmWave MIMO communication transceivers. This is motivated by the deployment of advanced mmWave communication systems in future AR/VR devices for meeting the high data rate demands and by the interesting propagation characteristics of mmWave signals. Accounting for the constraints on these systems, we develop a comprehensive framework for constructing accurate and high-resolution depth maps using mmWave systems. In this framework, we developed new sensing beamforming codebook approaches that are specific for the depth map construction objective. Using these codebooks, and leveraging tools from successive interference cancellation, we develop a joint beam processing approach that can construct high-resolution depth maps using practical mmWave antenna arrays. Extensive simulation results highlight the potential of the proposed solution in building accurate depth maps. Further, these simulations show the promising gains of mmWave based depth perception compared to RGB-based approaches in several important use cases.