 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain Expansion: A Latent Space Construction Framework for Multi-Task Learning
Jan 27, 2026Training a single network with multiple objectives often leads to conflicting gradients that degrade shared representations, forcing them into a compromised state that is suboptimal for any single task--a problem we term latent representation collapse. We introduce Domain Expansion, a framework that prevents these conflicts by restructuring the latent space itself. Our framework uses a novel orthogonal pooling mechanism to construct a latent space where each objective is assigned to a mutually orthogonal subspace. We validate our approach across diverse benchmarks--including ShapeNet, MPIIGaze, and Rotated MNIST--on challenging multi-objective problems combining classification with pose and gaze estimation. Our experiments demonstrate that this structure not only prevents collapse but also yields an explicit, interpretable, and compositional latent space where concepts can be directly manipulated.
SEPose: A Synthetic Event-based Human Pose Estimation Dataset for Pedestrian Monitoring
Jul 16, 2025Event-based sensors have emerged as a promising solution for addressing challenging conditions in pedestrian and traffic monitoring systems. Their low-latency and high dynamic range allow for improved response time in safety-critical situations caused by distracted walking or other unusual movements. However, the availability of data covering such scenarios remains limited. To address this gap, we present SEPose -- a comprehensive synthetic event-based human pose estimation dataset for fixed pedestrian perception generated using dynamic vision sensors in the CARLA simulator. With nearly 350K annotated pedestrians with body pose keypoints from the perspective of fixed traffic cameras, SEPose is a comprehensive synthetic multi-person pose estimation dataset that spans busy and light crowds and traffic across diverse lighting and weather conditions in 4-way intersections in urban, suburban, and rural environments. We train existing state-of-the-art models such as RVT and YOLOv8 on our dataset and evaluate them on real event-based data to demonstrate the sim-to-real generalization capabilities of the proposed dataset.
Event Quality Score (EQS): Assessing the Realism of Simulated Event Camera Streams via Distances in Latent Space
Apr 21, 2025Event cameras promise a paradigm shift in vision sensing with their low latency, high dynamic range, and asynchronous nature of events. Unfortunately, the scarcity of high-quality labeled datasets hinders their widespread adoption in deep learning-driven computer vision. To mitigate this, several simulators have been proposed to generate synthetic event data for training models for detection and estimation tasks. However, the fundamentally different sensor design of event cameras compared to traditional frame-based cameras poses a challenge for accurate simulation. As a result, most simulated data fail to mimic data captured by real event cameras. Inspired by existing work on using deep features for image comparison, we introduce event quality score (EQS), a quality metric that utilizes activations of the RVT architecture. Through sim-to-real experiments on the DSEC driving dataset, it is shown that a higher EQS implies improved generalization to real-world data after training on simulated events. Thus, optimizing for EQS can lead to developing more realistic event camera simulators, effectively reducing the simulation gap. EQS is available at https://github.com/eventbasedvision/EQS.
Recent Event Camera Innovations: A Survey
Aug 27, 2024



Event-based vision, inspired by the human visual system, offers transformative capabilities such as low latency, high dynamic range, and reduced power consumption. This paper presents a comprehensive survey of event cameras, tracing their evolution over time. It introduces the fundamental principles of event cameras, compares them with traditional frame cameras, and highlights their unique characteristics and operational differences. The survey covers various event camera models from leading manufacturers, key technological milestones, and influential research contributions. It explores diverse application areas across different domains and discusses essential real-world and synthetic datasets for research advancement. Additionally, the role of event camera simulators in testing and development is discussed. This survey aims to consolidate the current state of event cameras and inspire further innovation in this rapidly evolving field. To support the research community, a GitHub page (https://github.com/chakravarthi589/Event-based-Vision_Resources) categorizes past and future research articles and consolidates valuable resources.
SEVD: Synthetic Event-based Vision Dataset for Ego and Fixed Traffic Perception
Apr 12, 2024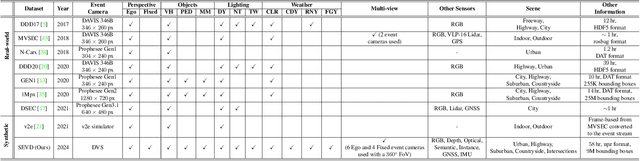
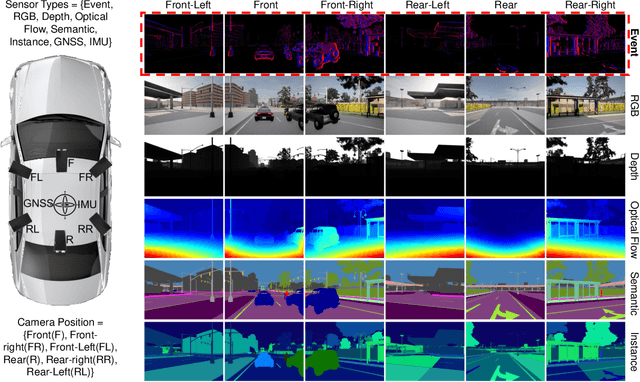
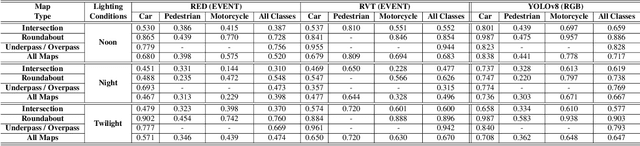

Recently, event-based vision sensors have gained attention for autonomous driving applications, as conventional RGB cameras face limitations in handling challenging dynamic conditions. However, the availability of real-world and synthetic event-based vision datasets remains limited. In response to this gap, we present SEVD, a first-of-its-kind multi-view ego, and fixed perception synthetic event-based dataset using multiple dynamic vision sensors within the CARLA simulator. Data sequences are recorded across diverse lighting (noon, nighttime, twilight) and weather conditions (clear, cloudy, wet, rainy, foggy) with domain shifts (discrete and continuous). SEVD spans urban, suburban, rural, and highway scenes featuring various classes of objects (car, truck, van, bicycle, motorcycle, and pedestrian). Alongside event data, SEVD includes RGB imagery, depth maps, optical flow, semantic, and instance segmentation, facilitating a comprehensive understanding of the scene. Furthermore, we evaluate the dataset using state-of-the-art event-based (RED, RVT) and frame-based (YOLOv8) methods for traffic participant detection tasks and provide baseline benchmarks for assessment. Additionally, we conduct experiments to assess the synthetic event-based dataset's generalization capabilities. The dataset is available at https://eventbasedvision.github.io/SEVD
eTraM: Event-based Traffic Monitoring Dataset
Apr 02, 2024
Event cameras, with their high temporal and dynamic range and minimal memory usage, have found applications in various fields. However, their potential in static traffic monitoring remains largely unexplored. To facilitate this exploration, we present eTraM - a first-of-its-kind, fully event-based traffic monitoring dataset. eTraM offers 10 hr of data from different traffic scenarios in various lighting and weather conditions, providing a comprehensive overview of real-world situations. Providing 2M bounding box annotations, it covers eight distinct classes of traffic participants, ranging from vehicles to pedestrians and micro-mobility. eTraM's utility has been assessed using state-of-the-art methods for traffic participant detection, including RVT, RED, and YOLOv8. We quantitatively evaluate the ability of event-based models to generalize on nighttime and unseen scenes. Our findings substantiate the compelling potential of leveraging event cameras for traffic monitoring, opening new avenues for research and application. eTraM is available at https://eventbasedvision.github.io/eTraM