 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRACO: Weakly Supervised Dense Reconstruction And Canonicalization of Objects
Nov 25, 2020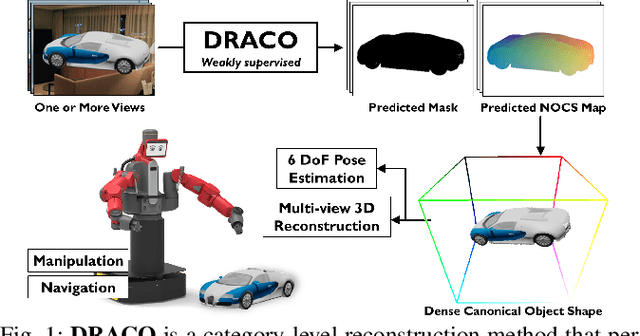
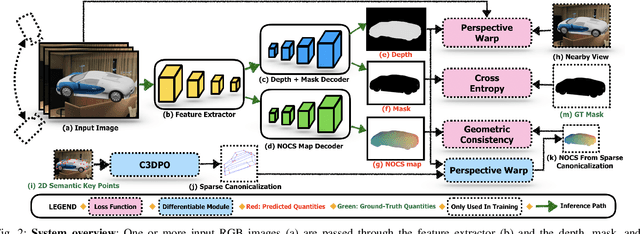
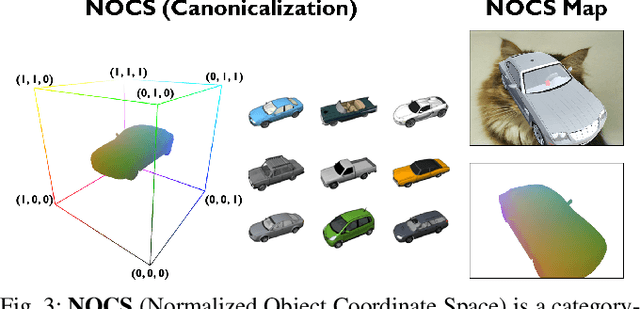
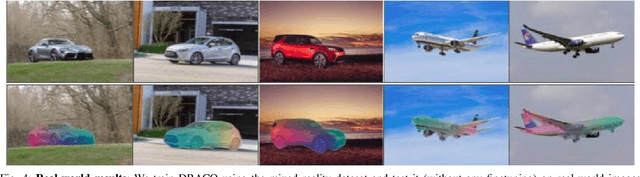
We present DRACO, a method for Dense Reconstruction And Canonicalization of Object shape from one or more RGB images. Canonical shape reconstruction, estimating 3D object shape in a coordinate space canonicalized for scale, rotation, and translation parameters, is an emerging paradigm that holds promise for a multitude of robotic applications. Prior approaches either rely on painstakingly gathered dense 3D supervision, or produce only sparse canonical representations, limiting real-world applicability. DRACO performs dense canonicalization using only weak supervision in the form of camera poses and semantic keypoints at train time. During inference, DRACO predicts dense object-centric depth maps in a canonical coordinate-space, solely using one or more RGB images of an object. Extensive experiments on canonical shape reconstruction and pose estimation show that DRACO is competitive or superior to fully-supervised methods.