 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Kernel Machine Learning for Autonomous Materials Science
Jan 16, 2026Autonomous materials science, where active learning is used to navigate large compositional phase space, has emerged as a powerful vehicle to rapidly explore new materials. A crucial aspect of autonomous materials science is exploring new materials using as little data as possible. Gaussian process-based active learning allows effective charting of multi-dimensional parameter space with a limited number of training data, and thus is a common algorithmic choice for autonomous materials science. An integral part of the autonomous workflow is the application of kernel functions for quantifying similarities among measured data points. A recent theoretical breakthrough has shown that quantum kernel models can achieve similar performance with less training data than classical models. This signals the possible advantage of applying quantum kernel machine learning to autonomous materials discovery. In this work, we compare quantum and classical kernels for their utility in sequential phase space navigation for autonomous materials science. Specifically, we compute a quantum kernel and several classical kernels for x-ray diffraction patterns taken from an Fe-Ga-Pd ternary composition spread library. We conduct our study on both IonQ's Aria trapped ion quantum computer hardware and the corresponding classical noisy simulator. We experimentally verify that a quantum kernel model can outperform some classical kernel models. The results highlight the potential of quantum kernel machine learning methods for accelerating materials discovery and suggest complex x-ray diffraction data is a candidate for robust quantum kernel model advantage.
Real-time experiment-theory closed-loop interaction for autonomous materials science
Oct 22, 2024Iterative cycles of theoretical prediction and experimental validation are the cornerstone of the modern scientific method. However, the proverbial "closing of the loop" in experiment-theory cycles in practice are usually ad hoc, often inherently difficult, or impractical to repeat on a systematic basis, beset by the scale or the time constraint of computation or the phenomena under study. Here, we demonstrate Autonomous MAterials Search Engine (AMASE), where we enlist robot science to perform self-driving continuous cyclical interaction of experiments and computational predictions for materials exploration. In particular, we have applied the AMASE formalism to the rapid mapping of a temperature-composition phase diagram, a fundamental task for the search and discovery of new materials. Thermal processing and experimental determination of compositional phase boundaries in thin films are autonomously interspersed with real-time updating of the phase diagram prediction through the minimization of Gibbs free energies. AMASE was able to accurately determine the eutectic phase diagram of the Sn-Bi binary thin-film system on the fly from a self-guided campaign covering just a small fraction of the entire composition - temperature phase space, translating to a 6-fold reduction in the number of necessary experiments. This study demonstrates for the first time the possibility of real-time, autonomous, and iterative interactions of experiments and theory carried out without any human intervention.
Learning material synthesis-process-structure-property relationship by data fusion: Bayesian Coregionalization N-Dimensional Piecewise Function Learning
Nov 20, 2023Autonomous materials research labs require the ability to combine and learn from diverse data streams. This is especially true for learning material synthesis-process-structure-property relationships, key to accelerating materials optimization and discovery as well as accelerating mechanistic understanding. We present the Synthesis-process-structure-property relAtionship coreGionalized lEarner (SAGE) algorithm. A fully Bayesian algorithm that uses multimodal coregionalization to merge knowledge across data sources to learn synthesis-process-structure-property relationships. SAGE outputs a probabilistic posterior for the relationships including the most likely relationships given the data.
Human-In-the-Loop for Bayesian Autonomous Materials Phase Mapping
Jun 17, 2023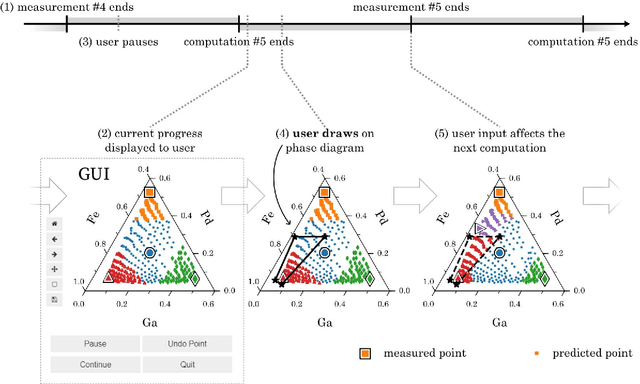



Autonomous experimentation (AE) combines machine learning and research hardware automation in a closed loop, guiding subsequent experiments toward user goals. As applied to materials research, AE can accelerate materials exploration, reducing time and cost compared to traditional Edisonian studies. Additionally, integrating knowledge from diverse sources including theory, simulations, literature, and domain experts can boost AE performance. Domain experts may provide unique knowledge addressing tasks that are difficult to automate. Here, we present a set of methods for integrating human input into an autonomous materials exploration campaign for composition-structure phase mapping. The methods are demonstrated on x-ray diffraction data collected from a thin film ternary combinatorial library. At any point during the campaign, the user can choose to provide input by indicating regions-of-interest, likely phase regions, and likely phase boundaries based on their prior knowledge (e.g., knowledge of the phase map of a similar material system), along with quantifying their certainty. The human input is integrated by defining a set of probabilistic priors over the phase map. Algorithm output is a probabilistic distribution over potential phase maps, given the data, model, and human input. We demonstrate a significant improvement in phase mapping performance given appropriate human input.
Scalable Multi-Agent Framework for Optimizing the Lab and Warehouse
Aug 19, 2022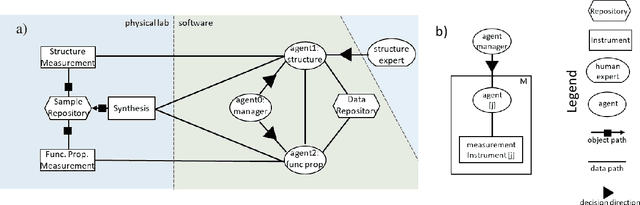


The field of autonomous physical science - where machine learning guides and learns from experiments in a closed-loop - is rapidly growing in importance. Autonomous systems allow scientists to fail smarter, learn faster, and spend less resources in their studies. The field promises improved performance for various facilities such as labs, research and development pipelines, and warehouses. As autonomous systems grow in number, capability, and complexity, a new challenge arises - how will these systems work together across large facilities? We explore one solution to this question - a multi-agent framework. We demonstrate a framework with 1) a simulated facility with realistic resource limits such as equipment use limits, 2) machine learning agents with diverse learning capabilities and goals, control over lab instruments, and the ability to run research campaigns, and 3) a network over which these agents can share knowledge and work together to achieve individual or collective goals. The framework is dubbed the MULTI-agent auTonomous fAcilities - a Scalable frameworK aka MULTITASK. MULTITASK allows facility-wide simulations including agent-instrument and agent-agent interactions. Framework modularity allows real-world autonomous spaces to come on-line in phases, with simulated instruments gradually replaced by real-world instruments. Here we demonstrate the framework with a real-world materials science challenge of materials exploration and optimization in a simulated materials lab. We hope the framework opens new areas of research in agent-based facility control scenarios such as agent-to-agent markets and economies, management and decision-making structures, communication and data-sharing structures, and optimization strategies for agents and facilities including those based on game theory.
A Low-Cost Robot Science Kit for Education with Symbolic Regression for Hypothesis Discovery and Validation
Apr 13, 2022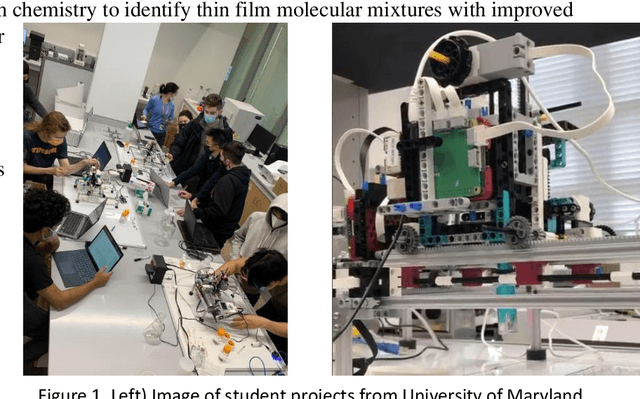
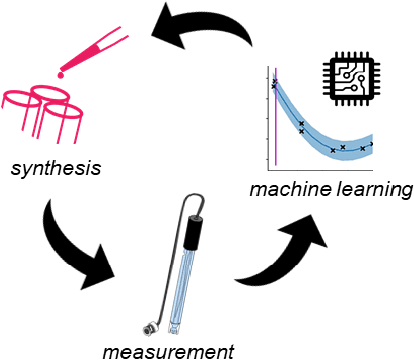
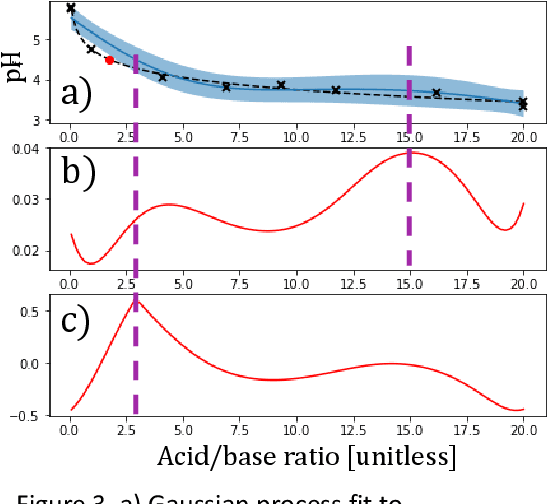
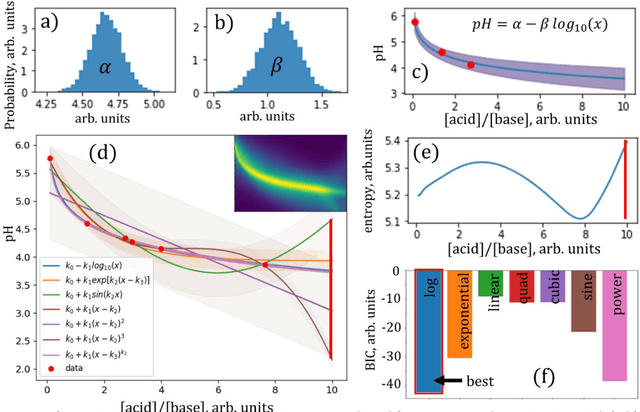
The next generation of physical science involves robot scientists - autonomous physical science systems capable of experimental design, execution, and analysis in a closed loop. Such systems have shown real-world success for scientific exploration and discovery, including the first discovery of a best-in-class material. To build and use these systems, the next generation workforce requires expertise in diverse areas including ML, control systems, measurement science, materials synthesis, decision theory, among others. However, education is lagging. Educators need a low-cost, easy-to-use platform to teach the required skills. Industry can also use such a platform for developing and evaluating autonomous physical science methodologies. We present the next generation in science education, a kit for building a low-cost autonomous scientist. The kit was used during two courses at the University of Maryland to teach undergraduate and graduate students autonomous physical science. We discuss its use in the course and its greater capability to teach the dual tasks of autonomous model exploration, optimization, and determination, with an example of autonomous experimental "discovery" of the Henderson-Hasselbalch equation.
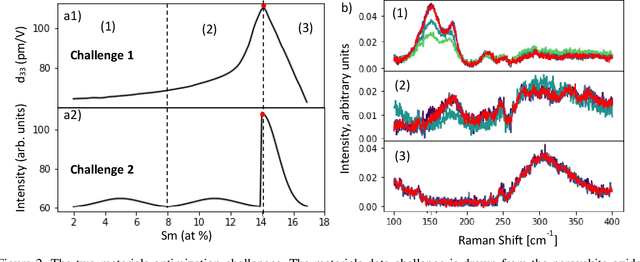
Benchmarking Active Learning Strategies for Materials Optimization and Discovery
Apr 12, 2022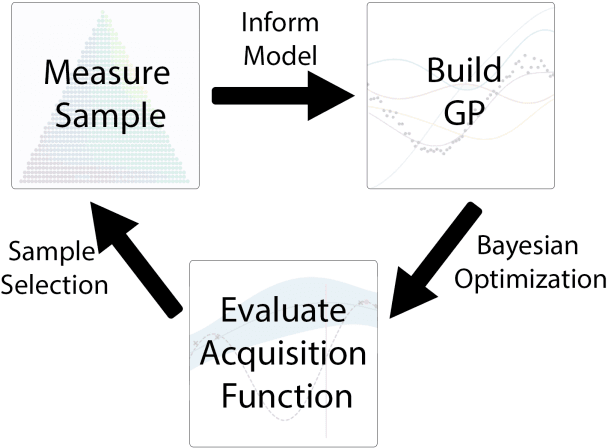
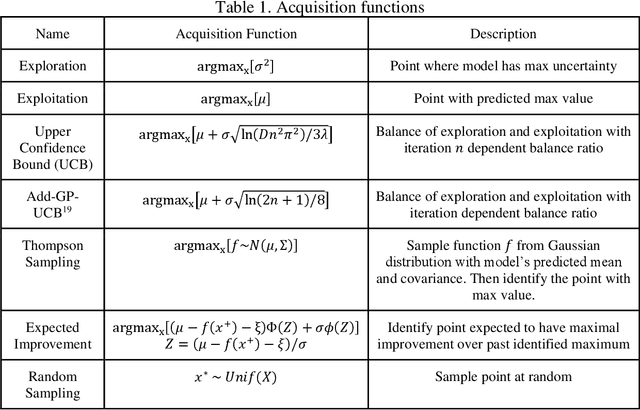
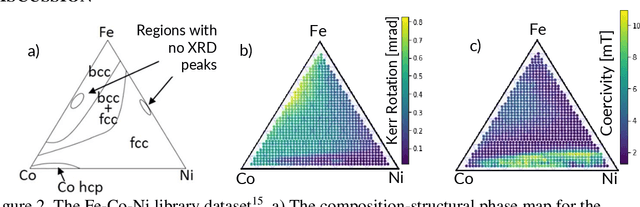
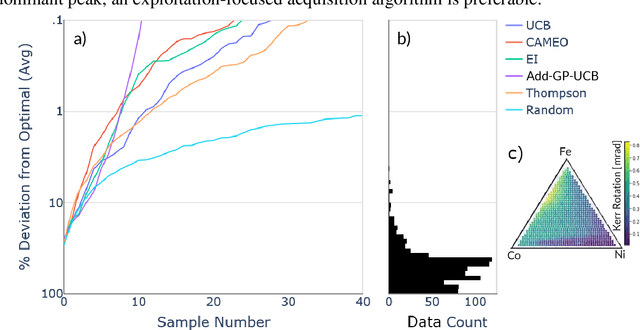
Autonomous physical science is revolutionizing materials science. In these systems, machine learning controls experiment design, execution, and analysis in a closed loop. Active learning, the machine learning field of optimal experiment design, selects each subsequent experiment to maximize knowledge toward the user goal. Autonomous system performance can be further improved with implementation of scientific machine learning, also known as inductive bias-engineered artificial intelligence, which folds prior knowledge of physical laws (e.g., Gibbs phase rule) into the algorithm. As the number, diversity, and uses for active learning strategies grow, there is an associated growing necessity for real-world reference datasets to benchmark strategies. We present a reference dataset and demonstrate its use to benchmark active learning strategies in the form of various acquisition functions. Active learning strategies are used to rapidly identify materials with optimal physical properties within a ternary materials system. The data is from an actual Fe-Co-Ni thin-film library and includes previously acquired experimental data for materials compositions, X-ray diffraction patterns, and two functional properties of magnetic coercivity and the Kerr rotation. Popular active learning methods along with a recent scientific active learning method are benchmarked for their materials optimization performance. We discuss the relationship between algorithm performance, materials search space complexity, and the incorporation of prior knowledge.
Physics in the Machine: Integrating Physical Knowledge in Autonomous Phase-Mapping
Nov 15, 2021
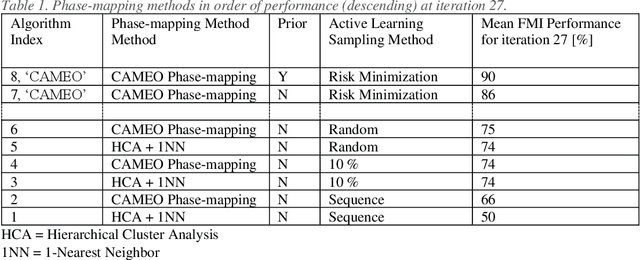
Application of artificial intelligence (AI), and more specifically machine learning, to the physical sciences has expanded significantly over the past decades. In particular, science-informed AI or scientific AI has grown from a focus on data analysis to now controlling experiment design, simulation, execution and analysis in closed-loop autonomous systems. The CAMEO (closed-loop autonomous materials exploration and optimization) algorithm employs scientific AI to address two tasks: learning a material system's composition-structure relationship and identifying materials compositions with optimal functional properties. By integrating these, accelerated materials screening across compositional phase diagrams was demonstrated, resulting in the discovery of a best-in-class phase change memory material. Key to this success is the ability to guide subsequent measurements to maximize knowledge of the composition-structure relationship, or phase map. In this work we investigate the benefits of incorporating varying levels of prior physical knowledge into CAMEO's autonomous phase-mapping. This includes the use of ab-initio phase boundary data from the AFLOW repositories, which has been shown to optimize CAMEO's search when used as a prior.
On-the-fly Closed-loop Autonomous Materials Discovery via Bayesian Active Learning
Jun 11, 2020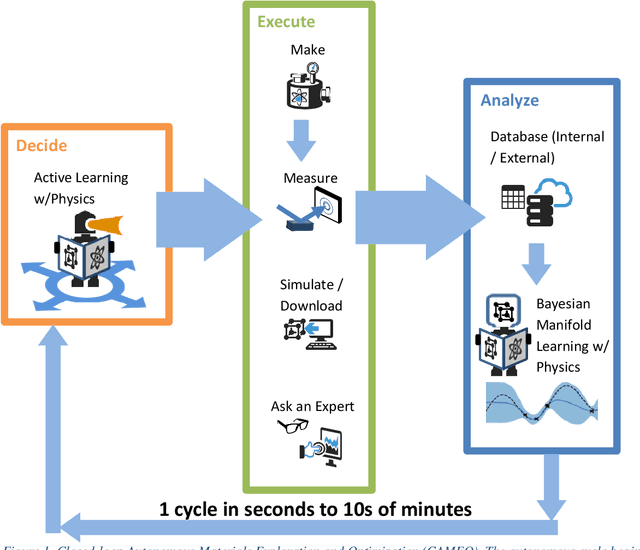
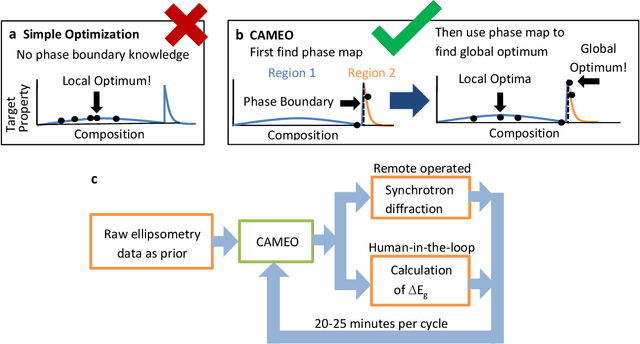
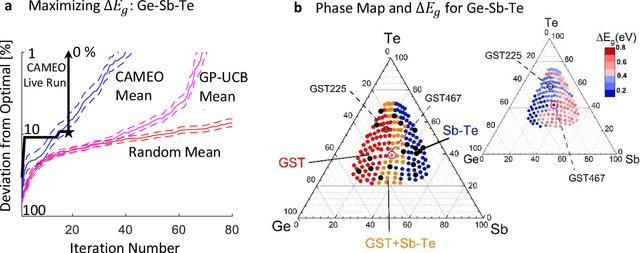
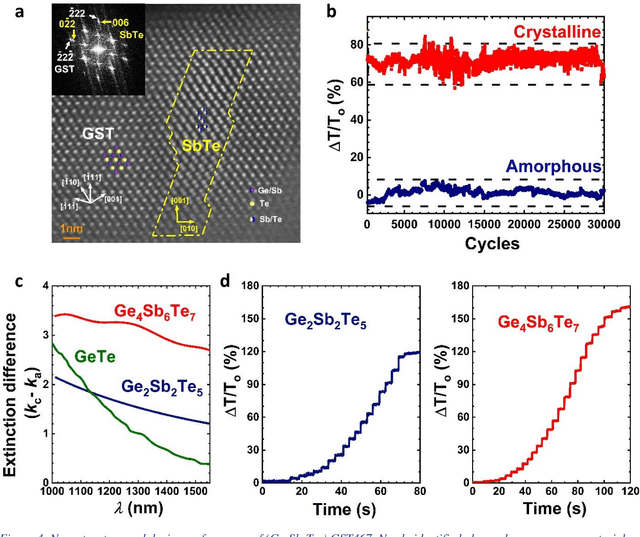
Active learning - the field of machine learning (ML) dedicated to optimal experiment design, has played a part in science as far back as the 18th century when Laplace used it to guide his discovery of celestial mechanics [1]. In this work we focus a closed-loop, active learning-driven autonomous system on another major challenge, the discovery of advanced materials against the exceedingly complex synthesis-processes-structure-property landscape. We demonstrate autonomous research methodology (i.e. autonomous hypothesis definition and evaluation) that can place complex, advanced materials in reach, allowing scientists to fail smarter, learn faster, and spend less resources in their studies, while simultaneously improving trust in scientific results and machine learning tools. Additionally, this robot science enables science-over-the-network, reducing the economic impact of scientists being physically separated from their labs. We used the real-time closed-loop, autonomous system for materials exploration and optimization (CAMEO) at the synchrotron beamline to accelerate the fundamentally interconnected tasks of rapid phase mapping and property optimization, with each cycle taking seconds to minutes, resulting in the discovery of a novel epitaxial nanocomposite phase-change memory material.
CRYSPNet: Crystal Structure Predictions via Neural Network
Mar 31, 2020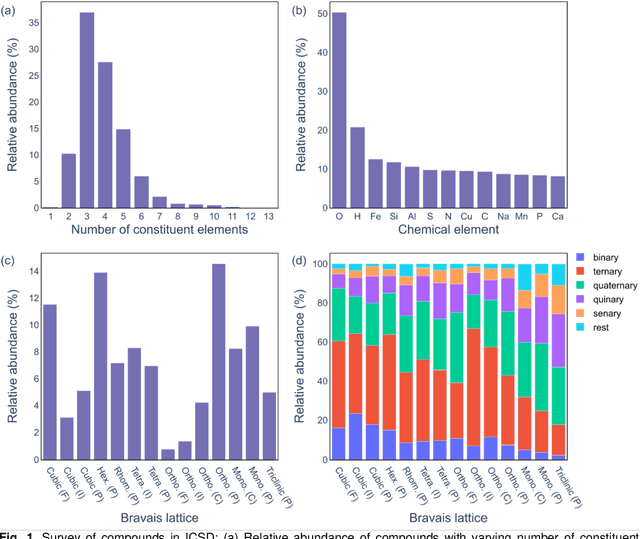
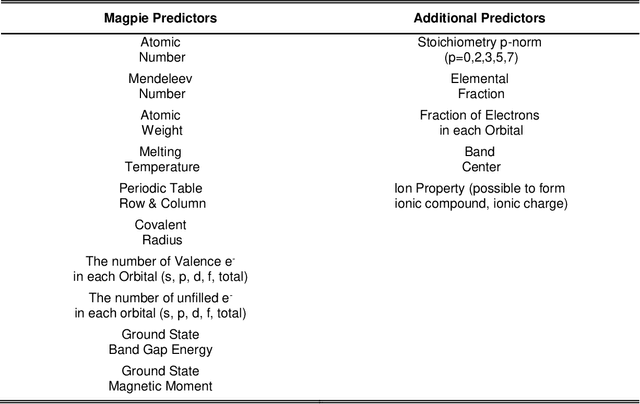
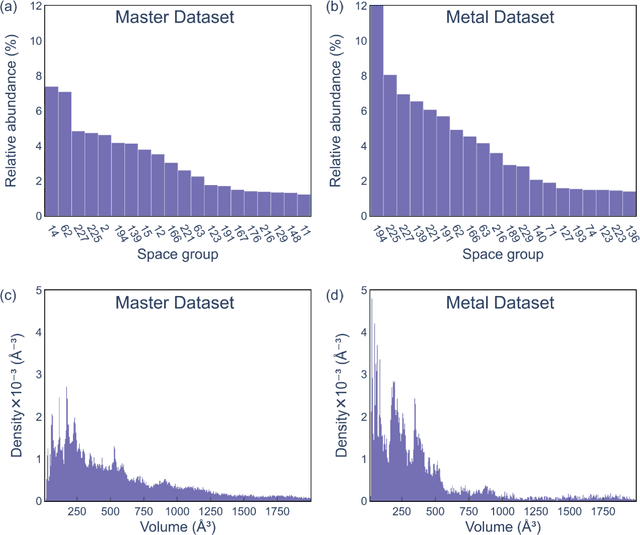
Structure is the most basic and important property of crystalline solids; it determines directly or indirectly most materials characteristics. However, predicting crystal structure of solids remains a formidable and not fully solved problem. Standard theoretical tools for this task are computationally expensive and at times inaccurate. Here we present an alternative approach utilizing machine learning for crystal structure prediction. We developed a tool called Crystal Structure Prediction Network (CRYSPNet) that can predict the Bravais lattice, space group, and lattice parameters of an inorganic material based only on its chemical composition. CRYSPNet consists of a series of neural network models, using as inputs predictors aggregating the properties of the elements constituting the compound. It was trained and validated on more than 100,000 entries from the Inorganic Crystal Structure Database. The tool demonstrates robust predictive capability and outperforms alternative strategies by a large margin. Made available to the public (at https://github.com/AuroraLHT/cryspnet), it can be used both as an independent prediction engine or as a method to generate candidate structures for further computational and/or experimental validation.