 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Recognition using Dual Visual-Semantic Mapping Paths
Paper and Code
Mar 20, 2017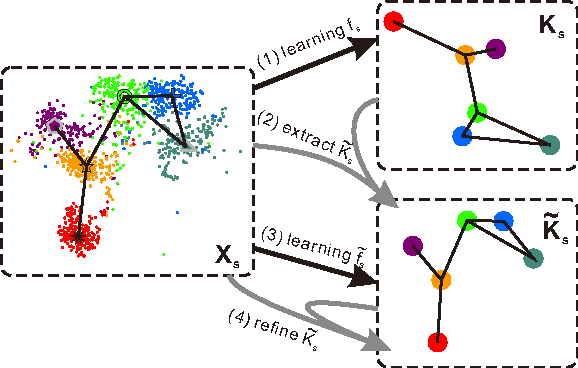
Zero-shot recognition aims to accurately recognize objects of unseen classes by using a shared visual-semantic mapping between the image feature space and the semantic embedding space. This mapping is learned on training data of seen classes and is expected to have transfer ability to unseen classes. In this paper, we tackle this problem by exploiting the intrinsic relationship between the semantic space manifold and the transfer ability of visual-semantic mapping. We formalize their connection and cast zero-shot recognition as a joint optimization problem. Motivated by this, we propose a novel framework for zero-shot recognition, which contains dual visual-semantic mapping paths. Our analysis shows this framework can not only apply prior semantic knowledge to infer underlying semantic manifold in the image feature space, but also generate optimized semantic embedding space, which can enhance the transfer ability of the visual-semantic mapping to unseen classes. The proposed method is evaluated for zero-shot recognition on four benchmark datasets, achieving outstanding results.