 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Learning on 3D Point Cloud Objects and Beyond
Paper and Code
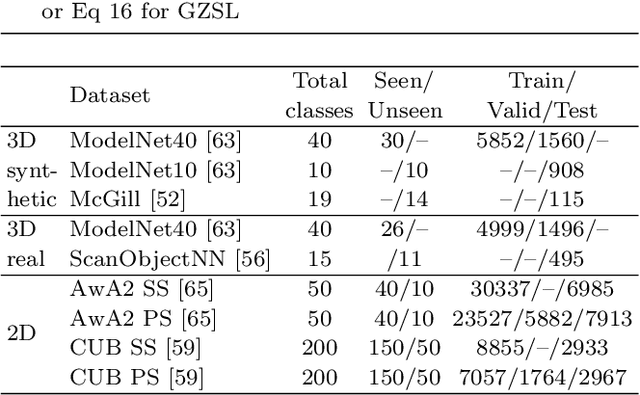
Zero-shot learning, the task of learning to recognize new classes not seen during training, has received considerable attention in the case of 2D image classification. However, despite the increasing ubiquity of 3D sensors, the corresponding 3D point cloud classification problem has not been meaningfully explored and introduces new challenges. In this paper, we identify some of the challenges and apply 2D Zero-Shot Learning (ZSL) methods in the 3D domain to analyze the performance of existing models. Then, we propose a novel approach to address the issues specific to 3D ZSL. We first present an inductive ZSL process and then extend it to the transductive ZSL and Generalized ZSL (GZSL) settings for 3D point cloud classification. To this end, a novel loss function is developed that simultaneously aligns seen semantics with point cloud features and takes advantage of unlabeled test data to address some known issues (e.g., the problems of domain adaptation, hubness, and data bias). While designed for the particularities of 3D point cloud classification, the method is shown to also be applicable to the more common use-case of 2D image classification. An extensive set of experiments is carried out, establishing state-of-the-art for ZSL and GZSL on synthetic (ModelNet40, ModelNet10, McGill) and real (ScanObjectNN) 3D point cloud datasets.