 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhy Deep Surgical Models Fail?: Revisiting Surgical Action Triplet Recognition through the Lens of Robustness
Paper and Code


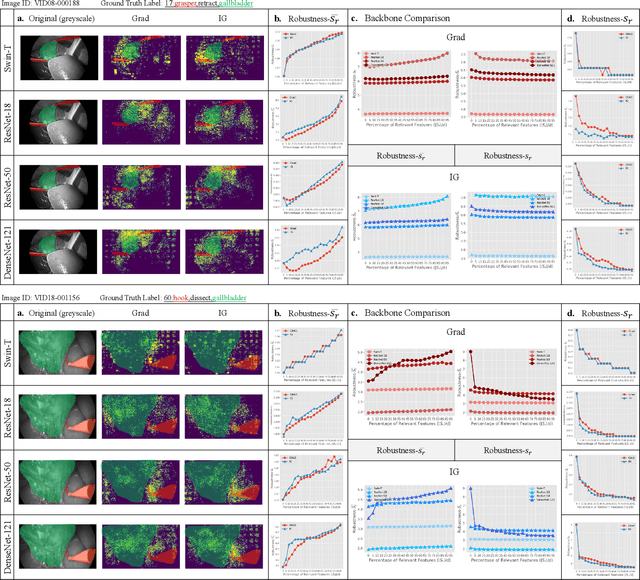
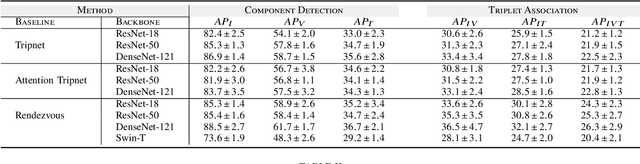
Surgical action triplet recognition provides a better understanding of the surgical scene. This task is of high relevance as it provides to the surgeon with context-aware support and safety. The current go-to strategy for improving performance is the development of new network mechanisms. However, the performance of current state-of-the-art techniques is substantially lower than other surgical tasks. Why is this happening? This is the question that we address in this work. We present the first study to understand the failure of existing deep learning models through the lens of robustness and explainabilty. Firstly, we study current existing models under weak and strong $\delta-$perturbations via adversarial optimisation scheme. We then provide the failure modes via feature based explanations. Our study revels that the key for improving performance and increasing reliability is in the core and spurious attributes. Our work opens the door to more trustworthiness and reliability deep learning models in surgical science.