 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhole-Body MPC and Online Gait Sequence Generation for Wheeled-Legged Robots
Paper and Code
Oct 13, 2020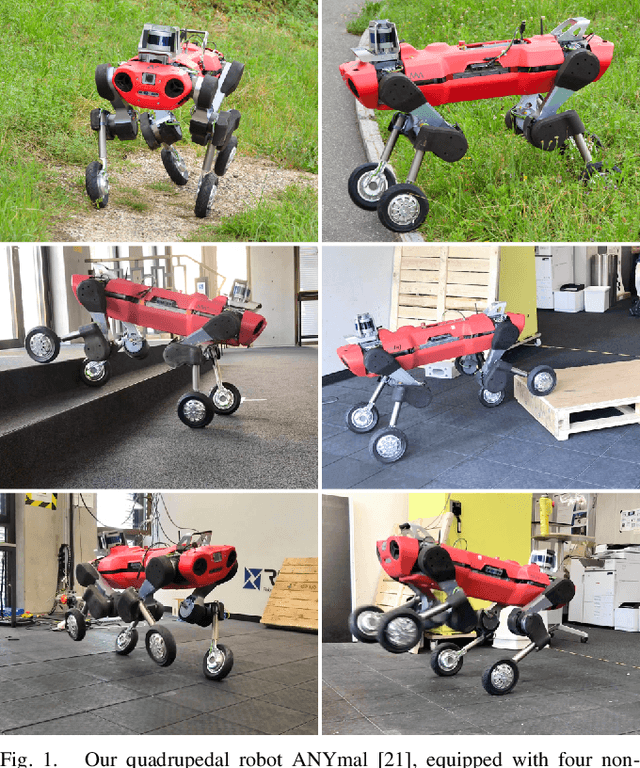

The additional degrees of freedom and missing counterparts in nature make designing locomotion capabilities for wheeled-legged robots more challenging. We propose a whole-body model predictive controller as a single task formulation that simultaneously optimizes wheel and torso motions. Due to the real-time joint velocity and ground reaction force optimization based on a kinodynamic model, our approach accurately captures the real robot's dynamics and automatically discovers complex and dynamic motions cumbersome to hand-craft through heuristics. Thanks to the single set of parameters for all behaviors, whole-body optimization makes online gait sequence adaptation possible. Aperiodic gait sequences are automatically found through kinematic leg utilities without the need for predefined contact and lift-off timings. Also, this enables us to reduce the cost of transport of wheeled-legged robots significantly. Our experiments demonstrate highly dynamic motions on a quadrupedal robot with non-steerable wheels in challenging indoor and outdoor environments. Herewith, we verify that a single task formulation is key to reveal the full potential of wheeled-legged robots.