 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere to look first? Behaviour control for fetch-and-carry missions of service robots
Paper and Code
Oct 06, 2015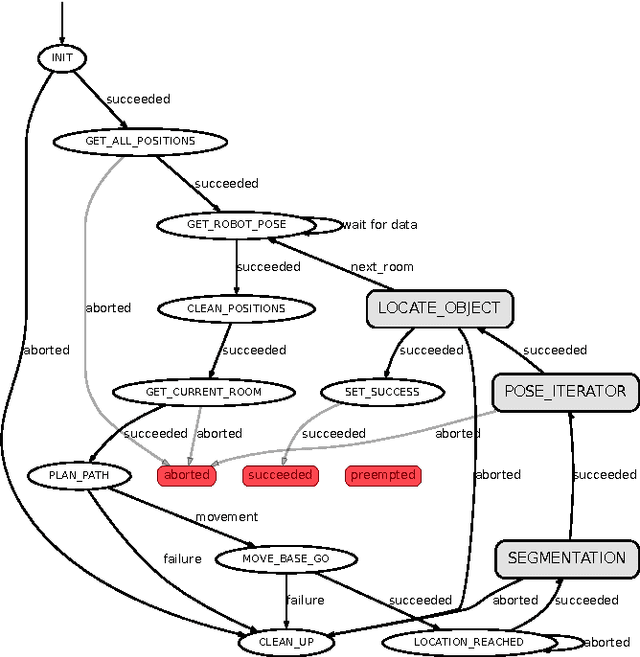
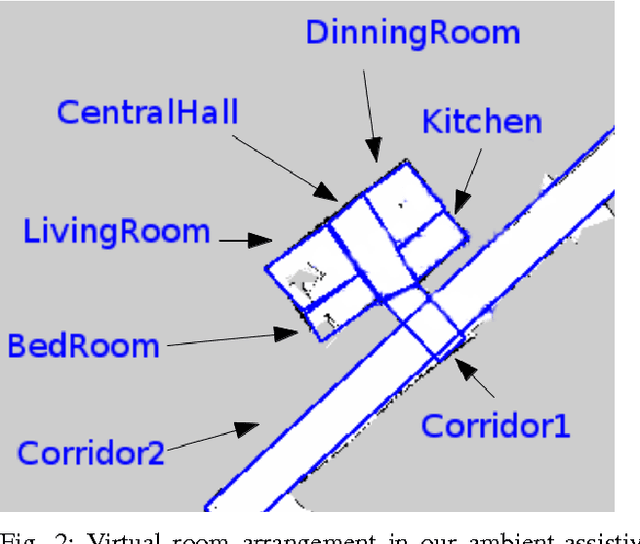
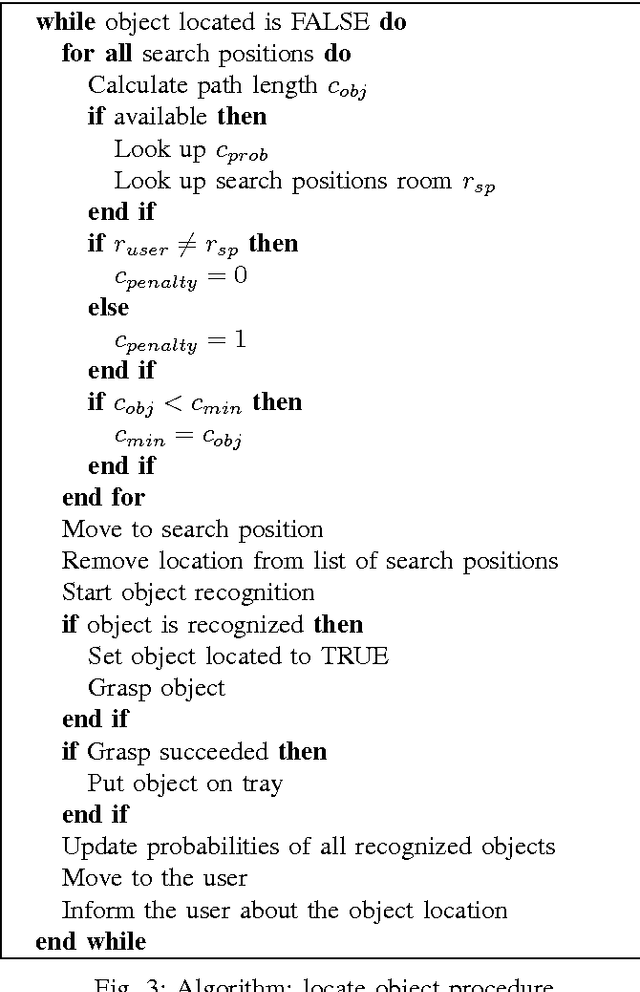
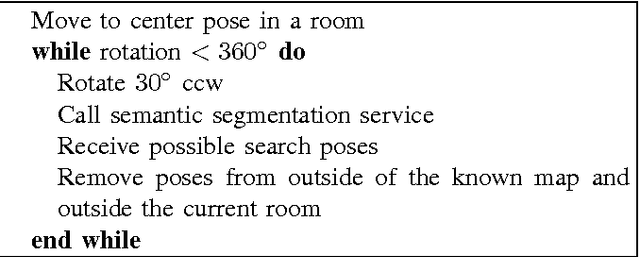
This paper presents the behaviour control of a service robot for intelligent object search in a domestic environment. A major challenge in service robotics is to enable fetch-and-carry missions that are satisfying for the user in terms of efficiency and human-oriented perception. The proposed behaviour controller provides an informed intelligent search based on a semantic segmentation framework for indoor scenes and integrates it with object recognition and grasping. Instead of manually annotating search positions in the environment, the framework automatically suggests likely locations to search for an object based on contextual information, e.g. next to tables and shelves. In a preliminary set of experiments we demonstrate that this behaviour control is as efficient as using manually annotated locations. Moreover, we argue that our approach will reduce the intensity of labour associated with programming fetch-and-carry tasks for service robots and that it will be perceived as more human-oriented.