 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeHelp: A Shared Autonomy System for Wheelchair Users
Paper and Code


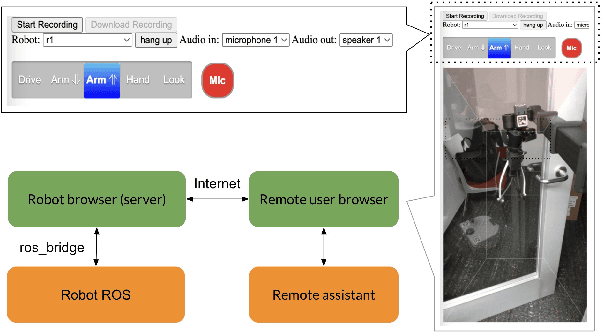

There is a large population of wheelchair users. Most of the wheelchair users need help with daily tasks. However, according to recent reports, their needs are not properly satisfied due to the lack of caregivers. Therefore, in this project, we develop WeHelp, a shared autonomy system aimed for wheelchair users. A robot with a WeHelp system has three modes, following mode, remote control mode and tele-operation mode. In the following mode, the robot follows the wheelchair user automatically via visual tracking. The wheelchair user can ask the robot to follow them from behind, by the left or by the right. When the wheelchair user asks for help, the robot will recognize the command via speech recognition, and then switch to the teleoperation mode or remote control mode. In the teleoperation mode, the wheelchair user takes over the robot with a joy stick and controls the robot to complete some complex tasks for their needs, such as opening doors, moving obstacles on the way, reaching objects on a high shelf or on the low ground, etc. In the remote control mode, a remote assistant takes over the robot and helps the wheelchair user complete some complex tasks for their needs. Our evaluation shows that the pipeline is useful and practical for wheelchair users. Source code and demo of the paper are available at \url{https://github.com/Walleclipse/WeHelp}.